http://www.forum8.com
Vol.59 2012/03/09
1.红外线深度传感器DTK
2.培训和讲座红外线深度传感器DTK
近年,作为新的用户界面,NUI(Natural User Interface)的开发取得了很大的发展。NUI是利用声音和身体进行直观操作的新界面。
DTK(Depth Tool Kit)是使用红外线深度传感器的NUI开发套件,从红外线深度传感器的距离信息中识别到用户,然后利用三维效果获取身体动作。如普通动作捕捉一样无需在身体上附加传感器和标记,这是DTK的一大优点。
在DTK上使用可能的设备是Xtion PRO, Xtion PRO LIVE, Kinect(TM)(图1)。每一种红外线深度传感器都应用PrimeSense(TM)公司的技术。从一侧的透镜照射红外线激光,在相反侧的透镜上读取反射光(图2)。图1的感应器上,绿色的透镜为激光和相反侧的受光部位。
Xtion PRO、Kinect(TM)的中央透镜是RGB照相机。Xtion PRO只装载了红外线深度感应器。
Xtion PRO LIVE及Kinect(TM)是具备其它功能的多功能设备(表1)。
XtionPRO Xtion PRO LIVE Kinect(TM)传感器 ■图1 红外线深度感应器(Xtion PRO, Xtion PRO LIVE, Kinect(TM))
■图2 红外线激光图案
■表1 红外线深度感应器功能比较
功能 Xtion PRO Xtion PRO LIVE Kinect(TM) 红外线深度感应器 640×480(VGA)/30fps
320×240(QVGA)/60fpsRGB照相机 × 1280×1024
(SXGA)640×480(VGA)/30fps
320×240(QVGA)/60fpsAudio麦克风 × 2 4 倾斜马达 × × ○ 连接方式 USB2.0 USB2.0 USB2.0 电源供应 USB总线电源 USB总线电源 AC适配器
DTK支持红外线和RGB照相机的功能。红外线深度感应器的有效范围在Xtion PRO, Xtion PRO LIVE中的标称值为0.8m~3.5m。Kinect(TM)的标称值为1.2m~3.5m。
DTK的概要
DTK是简单的利用红外线深度感应器的工具套件。从深度地图、RGB照相机影像的取得到用户识别三维动作的取得,只需发送命令,便可以简单运行。还可以同时识别・操作复数的用户,如果使用举止界面和2D菜单作成功能,可以马上作为输入设备进行使用。
使用深度地图信息和三维运行数据,可以作成完全不同的应用程序。
AirDriving &Gesture Interface
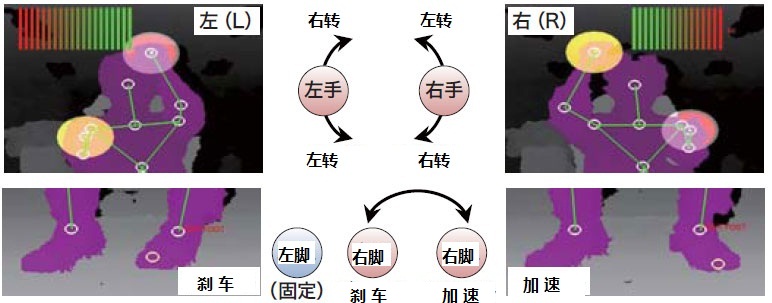
AirDriving & Gesture Interface是三维动作导入和举止导入组合成的Handless驾驶系统(图3)。使用从红外线深度感应器输入的四肢信息,执行UC-win/Road模型行驶。方向盘操作使用双手紧握方向盘转动便可实现。加速/刹车操作用脚踩踏板移动右脚,用脚尖左右移动来切换加速器/制动器。该设备可以识别到细微的动作,实现了流畅的驾驶模拟。
■图3 AirDriving(东京游戏展2011) ■图4 AirDriving驾驶操作
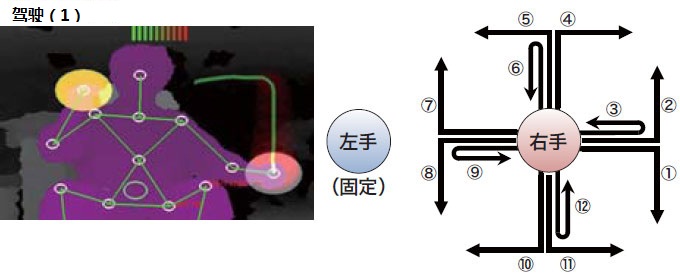
驱动/倒车的交换利用手势执行。手势的输入为,左手状态固定,如图5移动右手。AirDriving驱动手势1号,2号作为倒车使用。在脚本等中分配其它手势,无需使用鼠标和键盘,便能够执行从驾驶开始到结束的操作。
■图5 AirDriving 驱动(1)/倒车(2)
红外线深度感应器应用案例
FORUM8以AirDriving为开端,正在开发利用机器人遥控操作等的红外线深度感应器应用软件。
(如表2、3)。
■表2 使用红外线深度感应器的应用
应用 红外线深度感应器的用途 A)感应器 AirDriving Handless控制 B)遥控 RoboCar(R) 驾驶控制 AR.Drone 插件控制 机械臂 动作控制 SLAM 3D映射
■表3 红外线深度感应器的利用形态
功能 AirDriving RoboCar(R) AR.Drone 机械臂 SLAM 深度地图 ○ ○ ○ ○ ○ RGB视频流 × × × × ○ 用户空间 ○ ○ ○ ○ × 3D动作捕捉 ○ ○ ○ ○ × Gesture Interface × ○ ○ ○ ×
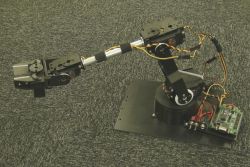
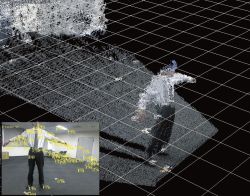
RoboCar(R)是ZMP公司1/10的比例模型车。使用AirDriving和动作界面,执行UC-win/Road和RoboCar(R)的同期行走模型。AR.Drone是Parrot公司的四轴飞行器(图6)。可以稳定飞行,也可以应用于空中拍摄等业务领域。使用3D动作捕捉和Gesture Interface可以控制AR.Drone和机械臂。SLAM(Simultaneous Localization And Mapping)是同时进行自己位置和环境地图制作的系统(图8)。根据红外线深度感应器的距离信息和RGB照相机颜色信息的合成实时制作三维点云模型(环境地图),并将获取的映像依次比较后生成一个连续的空间。这些技术可以应用到机器人控制和3D制图中。
图6 AR.Drone(Parrot公司) 图7 机械臂 AL5D(Lynxmotion公司) 图8 使用SLAM的3D扫描 3.培训和讲座 免费的软件培训按以下时间表定期在上海、北京召开。
上海 - Shanghai Seminar room (FORUM8 Technology Development(Shanghai) Co., Ltd.)
北京 - FORUM8 Technology Development(Shanghai) Co., Ltd(Beijing Office)
Seminar Date City UC-win/Road VR May 19, 2012 Shanghai, Beijing Traffic analysis/ VR simulation NEW ! March 16, 2012 Govermment, Local authority/VR-Cloud(R) May 16, 2012 Dynamic analysis/F3D March 13, 2012 Allplan April 18, 2012 UC-1 Series April 27, 2012 EXODUS/SMARTFIRE May 23, 2012 Engineer's Studio(R),
Engineer's Studio(R)(2D))April 11, 2012 xpswmm May 30, 2012 Design Builder March 22, 2012 High Performance Computing on Cloud Services TM trial March 8, 2012 Participation Fee Participation Fee Free
★ 基于隐私政策的个人信息保护措施 ★
- 根据我们的基本经营理念,为了向客户提供更优质的产品与服务,积极开展软件许可管理、宣传活动等,通过这些活动收集的个人信息我们将保密并严格保管。公司将努力提高个人信息的安全性,以确保个人信息管理安全。
★ 用户权利 ★
- 您对收到的电子邮报根据个人需要可以提出以下要求:
拒收本邮件;删除本邮件信息;变更邮箱地址
如有其它要求请在回信中注明★ 点击进入电子邮报服务申请页面 ★
FORUM8 Co., Ltd. mailto:ka@forum8.co.jp
Nakameguro GT Tower 15F
2-1-1 Kamimeguro Meguro-ku Tokyo 153-0051 JAPAN
TEL +81-3-5773-1888
FAX +81-3-5720-5688
http://www.forum8.com