| 1.车辆轨迹轨迹制图系统Ver.2新增功能 |
| 主要新增功能 |
| 在Ver.2中扩充了行驶方法以及对应车型、改善和增强了与3DVR模拟间的接口功能。 |
在Ver.1中如图1所示行驶路径的部分路段内的返回需要个别设置包含直行部分的所有路径,输入繁琐复杂。在新版本中为了简化输入对应了路径行驶与返回行驶组合。利用返回行驶功能如图1所示可以设置【路径行驶→返回行驶→路径行驶】组合,大大减少了设置需要输入的时间。
 |
| ■图1 组合行驶(红圈为返回位置) |
|
对应了新车型铰接巴士。铰接巴士如图2所示车辆后部接有多台巴士,各车辆之间用车篷连接。在本程序中假设类似全挂车的举动进行了车辆轨迹计算。
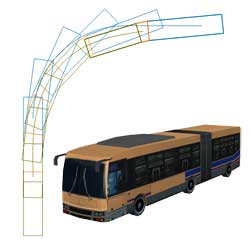 |
| ■图2 连节巴士轨迹示例 |
|
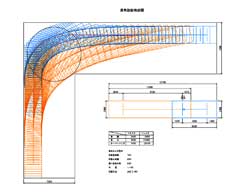
通过输入各车辆行驶速度与旋转半径的关系,可以设置对应输入速度的旋转半径(或是对应旋转半径的速度)。
 |
| ■图3 行驶轨迹与旋转半径间的关系 |
|
Ver.2中追加了行驶路径的调整功能。如在最初设置的路径中通过触碰行驶路径等确认和调整行驶轨迹。。如图4所示,可以确认移动轨迹的同时进行调整,行驶路径设置便捷快速。。
 |
| ■图4 线(路径)调整功能 |
|
在Ver.1中,OpenMicroSim文件输出功能只对应车辆各种形状的矩形模型,设置不同模型是在UC-win/Road中进行的,而Ver.2程序中即可设置车辆模型。
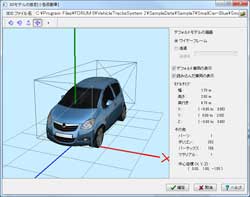 |
| ■图5 3DVR模拟(UC-win/Road) |
|
对应了OpenMicroSim文件的停止时间设置。停止时间如图6所示可以设置「行驶开始位置」、「旋转开始・结束位置」、「行驶结束位置」。另外、保存为OpenMicroSim文件时可以设置计算轨迹每一步骤的停止时间。
 |
| ■図6 停止位置 |
|
对应了车轴制图功能(图7)。可以选择是否制图以及更加细致的图面设置。
 |
| ■图7 图面制作(有车轴) |
|
我公司在上海、北京两地定期举办免费的软件培训会,具体时间安排如下。
上海 - Shanghai Seminar room 富朗巴软件科技(上海)有限公司
北京 - 富朗巴软件科技(上海)有限公司 北京办事处
★ 基于隐私政策的个人信息保护措施 ★
- 根据我们的基本经营理念,为了向客户提供更优质的产品与服务,积极开展
软件许可管理、宣传活动等,通过这些活动收集的个人信息我们将保密
并严格保管。公司将努力提高个人信息的安全性,以确保个人信息管理安全。
★ 用户权利 ★
- 您对收到的电子邮报根据个人需要可以提出以下要求:
拒收本邮件;删除本邮件信息;变更邮箱地址
如有其它要求请在回信中注明
★ 点击进入电子邮报服务申请页面 ★

