
UC-win/Road二次开发系统 移动测绘系统
程序概要
在测绘/建设行业的三维信息应用案例中,运用高精度GPS移动测绘装置采集点云数据,并根据点云数据制作模型备受瞩目。
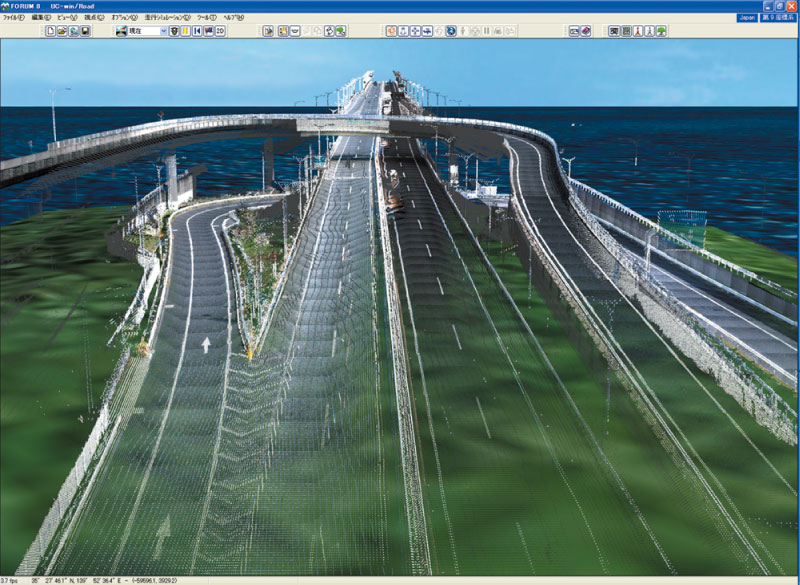
敝公司运用三菱移动测绘系统计 (MMS)测量海萤(umihotaru),将采集到的数据制作成样本数据。

▲涉谷的交叉口模型
相关信息
程序的功能与特点
■提供通过点云数据的VR建模・并支援UC-win/Road的服务
■提案针对点云数据VR建模的自定义功能开发
-
主要特点/功能
-
- 作为UC-win/Road中道路制作必要的参照数据的点云数据(Point-Cloud)所利用
可作为MMS后处理工具或是VR建模工具可与移动测量系统等综合使用。 - 作为UC-win/Road・VR模型的逆分析工具来利用点云数据
建议将点云数据应用于VR模型验证。 例如、还可利用于确保制作数据精度以及变化、劣化等差分解析的维护。 - 数据文件 :含有17,000,000坐标值的一个EXCEL文件
- 文件格式 : X坐标、Y坐标、Z坐标、R值、G值、B值
- 调查与设计:针对点云数据的理解与使用程序
- 道路的区间以及配置:道路区间构筑、在VR Mesh Reverse中进行对照、信息获取
- 制作建筑物模型时模型配置以及模型制作可以利用点云数据正确测定构造
- 学习如何调整UC-win/RoadVR数据、使用点云以及如何制作道路数据
- 在完全3D的状态中正确测定对象物以及道路。
- 项目的理解力高
- 是完整进行数据验证的方法
- 可利用于CAD设计与Google Earth Measurement间达成联合制作
- 数据测量所需时间较长
- 数据使用方法较难、需要较长的学习时间
- 需要内存容量较大的电脑
- 原始的数据格式
- 文件格式 : X坐标、Y坐标、Z坐标(高度)、R值、G值、B值
- 在Wordpad打开文件(在Excel以及Notepad中因为数据容量无法打开)
- 将文件作为txt.格式保存文本文件
- 为了将文本文件分割成1,000,000个,而使用GSplit程序
GSplit(免费软件) http://www.gdgsoft.com/gsplit/
●通过移动测量的点云数据应用
●样本项目
海萤-umihotaru-(东京湾跨海公路)样本数据制作概要
海萤是东京湾跨海公路的海上人工岛,因为其拥有立体交叉匝道、隧道、桥梁、停车场等复杂的构造,所以非常适合做为理解点云数据中对象物的优缺点之样本。
样本数据里有交叉匝道、隧道、桥梁、停车场等是复杂的构造物。
现在,用一般的建模工具进行调整后,将缩短在UC-Win/Road中建模的时间。
●项目工程详情介紹
●关于参考用点云数据的优点与缺点
优点
缺点
●数据格式与使用方法
●文件转换步骤
●VR Mesh Reverse概要与利用方法
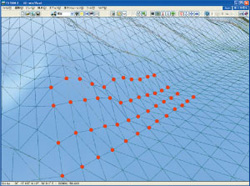
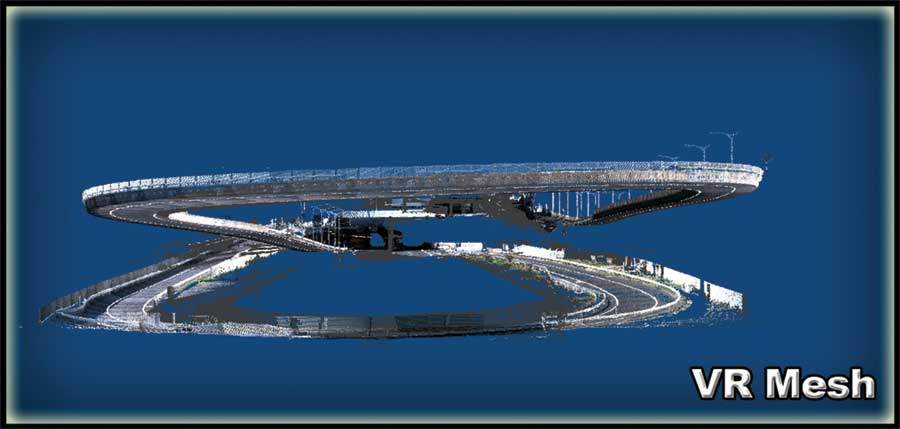
在海萤的项目中,作为结果的17个文本文件中包含了1,000,000坐标(含RGB值)。「VR Mesh Reverse」是作为可使用的程序之一。
VR Mesh Reverse的显著优点是,藉由可设为有效、无效的LOD功能来对有几百万坐标点的文件进行操作。
可高精度测定道路设计、对象物配置等基本内容。VR Mesh Reverse对于对应高性能电脑的范围进行了个别化。最后,透过可同时利用17,000,000坐标的VR Mesh Reverse功能可浏览点云3D中的数据,藉此达成理解数据的构筑方法。
●制作项目与所需天数(海莹项目)
制作项目 必要天数 备注 1. 调查与设计 5天 调查与包含设计时使用软件调查
调查由株式会社 FORUM8公司实施2. 道路区间以及配置 3天 3. 建筑物模型 1天 4. VR数据调整 2天 - 作为UC-win/Road中道路制作必要的参照数据的点云数据(Point-Cloud)所利用
-
UC-win/Road 点云数据插件
-
UC-win/Road点云数据插件具备了以导入点云数据为首,并含有以下的功能。 在3维VR空间中导入利用激光扫描仪等测量技术所测量的点云数据(例如:藉由车辆行驶测量、飞机测量等得出的点云数据(Point-Cloud)),并将点云描绘显示在指定的位置等基本功能。
可用激光扫描仪扫描的点云数据为基础生成地形TIN数据,并利用地形补丁功能进行地形建模。
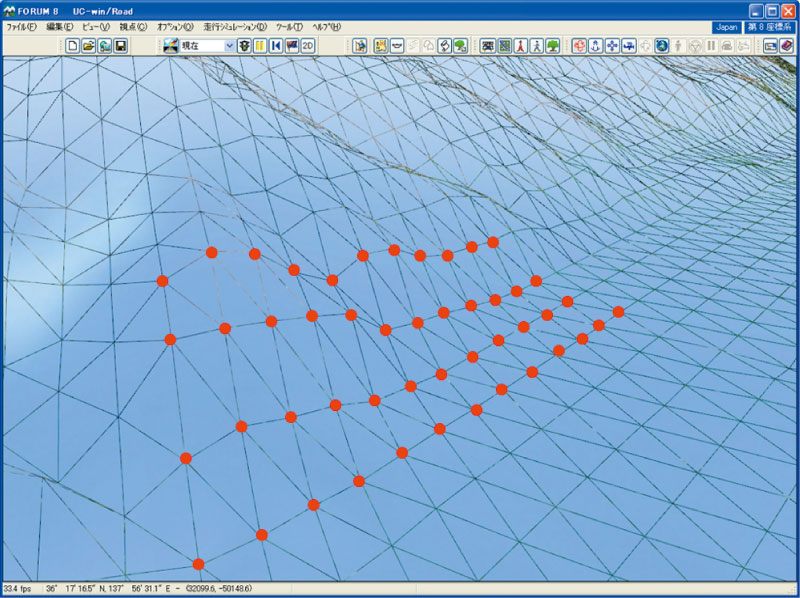
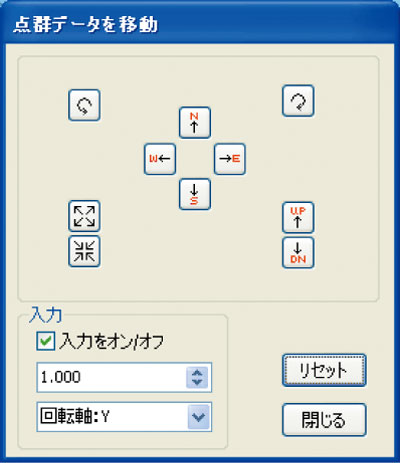
在三维空间上并行移动、旋转移动点云数据来调整点云数据,还可以微调显示位置。
基于点云数据生成的地形数据可以输出为LandXML数据后应用于其他系统。
▲点云数据导入

▲点云数据导入、描绘显示
▲点云描绘选项
▲地形TIN数据生成、地形建模

▲点云数据位置调整
-
VR网格功能概要
-
上百万点云数据使用中不可缺少的VR Mesh功能介绍
VR Mesh Reverse : 价格 $695.00US Virtual Grid公司 ( http://www.vrmesh.com/products/reverse.asp )
▲同时使用17,000,000点云的LOD功能
▲表现Window Clip中一部分的范围
▲透过UC-win/Road数据制作测定点云信息
选择上部的Analyze开始测定。
接着选择Measure Distance后点击数据的2个点云测定距离。
在界面中保持上次测定结果的同时还可测定点云。
然而,工具掌握着不同的坐标面,所以需要时间来适应这种方法。
-
运用点云数据制作的UC-win/Road模型概要
-
- 作为UC-win/Road道路制作必要的参照工具利用点云数据
作为MMS后处理工具或是VR建模工具,并可与移动测量系统综合使用。 - 作为UC-win/RoadVR模型的逆分析工具来使用点云数据
建议在VR模型验证中利用点云数据。
例如:可以利用于确保制作数据精度以及年代变化、劣化等差分解析的维护。
参考点云数据进行道路线形、断面定义。完成的VR模型为高精度的构造模型。可以作为VR模型应用于交通流、各种演示、协议等。
▲道路线形定义
▲纵断线形定义
▲断面定义

▲瞬间生成道路(初始模型)
生成交通流后可直接进行交通模拟
▲追加建筑物模与道路附加物等数据


点云数据应用提案
- 作为UC-win/Road道路制作必要的参照工具利用点云数据




-
三菱移动测量系统
-
- 车顶上装备3台GPS天线、IMU、摄像机、激光扫描仪为一体的组件。所有机器在工厂内调整完毕,不需复杂的调整与装设。将3台GPS设置成三角形,可保捉到高精度的车辆形状。
- 开发了给100msec分辨率中所获取的数据追加时间的感应盒。即使高速行驶也不降低数据收集精度。最多可连接5台摄像机、激光扫描仪。
- 制作道路附图的现况平面图
- 点云CAD化用于施工前后管理
- 制定3D地图制作的基准数据
- 确认道路周边情况
- 将标记笔跟相片一同使用,不只可以特定
标志、电柱、信号机、缘石等立体物,还可确定人行横道、路面标志等的位置。
三菱移动测量系统 -高精度GPS移动测量装备-
测量

地图制作

设备・道路管理
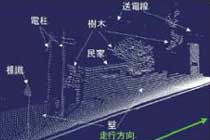
▼使用激光扫描仪与摄像机标定对象物位置,简单制作高精度城市3维地图。

产品价格
-
软件价格
-
■软件价格
产品名称
价格
产品构成
UC-win/Road Ultimate 113,000元 UC-win/Road 本体
+
全部功能插件UC-win/Road Advanced 58,000元 UC-win/Road 本体
+
UC-win/Road 点云建模插件 与
其他所有插件UC-win/Road 点云建模插件 11,000元 单卖插件 ■浮动授权价格
额外支付定价的40%,将可以在任意地点和任意PC上使用。
产品名称
价格
UC-win/Road Ultimate 45,200元 UC-win/Road Advanced 23,200元 UC-win/Road 点云建模插件 4,400元
>>点击查看授权详情
订阅价格
-
订阅价格
-
■服务内容
・免费提供版本升级 ・电话技术咨询服务
・咨询服务(电子邮件、FAX) ・下载服务 ・维护信息传送服务对象产品 第1年订阅费用 往后每年 订阅(UC-win/Road 点云建模插件) 免费 4,400元 订阅(UC-win/Road 点云建模插件 浮动授权) 6,160元
租赁/浮动租赁授权价格
■租赁授权:短期使用,价格低廉。
■浮动租赁授权:通过网络认证,可以在任意地点、任意电脑使用。
■临时租赁授权:可以在现有产品授权的基础上临时增加授权数量。以租赁许可期限(1到3个月)为单位进行授权,并根据使用记录进行收费。提前预约,可享受租赁授权15%的价格优惠。可以通过用户信息页面来申请。
※租赁授权或浮动租赁授权开始后无法更改期限,如需延长期限需要再次申请。
-
租赁/浮动租赁授权
-
■租赁授权
对象产品 2个月 3个月 6个月 UC-win/Road 点云建模插件 4,950元 5,830元 7,150元 ■浮动租赁授权
对象产品 2个月 3个月 6个月 UC-win/Road 点云建模插件 8,250元 9,790元 12,100元 

LOADING
-