 UC-win/Road Simulateur de conduite UC-win/Road Simulateur de conduite
Simulateur de conduite pour un véhicule à quatre roues et système du progiciel |
|
On peut créer divers environnements de conduite dans un milieu contrôlé et répéter les réapparitions.
Les simulateurs de conduite sont utilisés dans plusieurs domaines comme le développement du système des voitures, les recherches sur le trafic (ITS), le conducteur, les automobiles, les routes.
- Création d'un environnement de conduite libre en 3D grâce à UC-win/Road
- Progiciel avec Plugin standard
- Gratuité de données standards de VR, fabrication sur commande de
scénarios
- Options visuelles pour créer de divers environnements
- Prix raisonnable pour une production en série d'OEM
- Prend en compte les exigences d'une simulation à haut niveau par la fabrication sur commande
|
 |
|
|
Haut de page  |
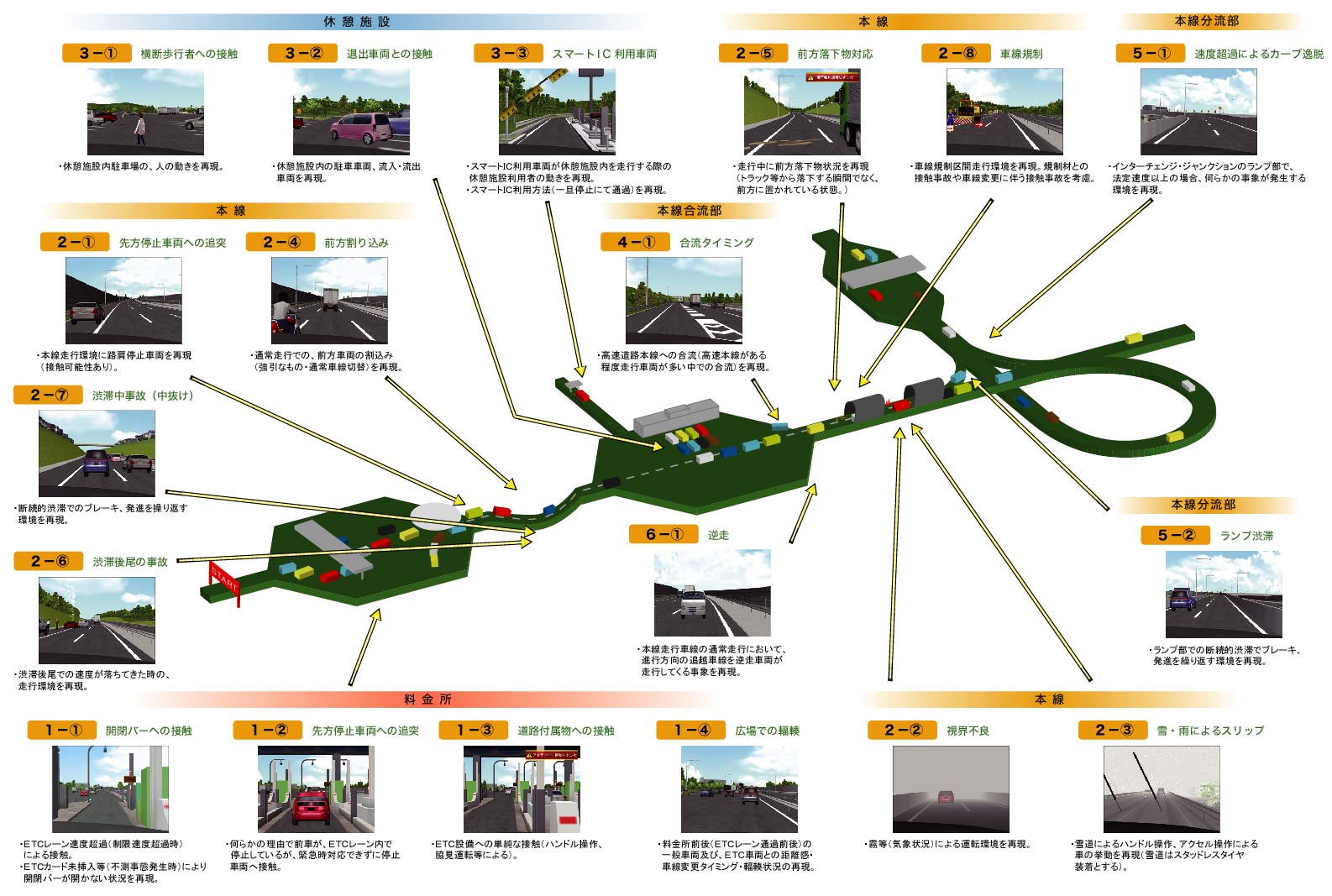
Simulateur de conduite Autoroute
Simulateur de conduite SUBARU avec des mouvements sur 6 axes |
|
Ce simulateur est équipé, par exemple, d'un volant de force feedback et vous sentez comme si vous conduisiez une vraie voiture. C'est un simulateur qui vous permet d'avoir des
expériences de la technique de la sécurité d'automobile (évitement de collision, réduction de choc), celles
d'accident de voiture, celles de la technique STI. |
|
 |
|
|
| Haut de page |
Autoroute Driving Simulator
Potential hazards on highway can be replayed by the driving simulator |
|
C'est un simulateur de conduite développé par SUBARU, qui utilise l'unité de motion électrique sur 6 axes (obtenu
un brevet) réalisé par la fusion de la technique de la section automobile de SUBARU. Ce simulateur est équipé d'un volant de voiture réelle et vous sentez comme si vous conduisiez une vraie voiture. C'est un simulateur qui vous permet d'avoir des expériences de la technique de la sécurité d'automobile (évitement de collision, réduction de choc), celles d'accident de voiture, celles de la technique STI.
|
 |
|
| Haut de page |
Simulateur de conduite sécuritaire d'UC-win/Road
Simulateur de conduite pour les auto-écoles conformes aux critères d'admission de type simulateur de conduite (pas encore admis) |
|
Conformément à la certification standard pour le simulateur de conduite : Scénario standard
|
1. Matériel pédagogique de prévision de danger
2. Matériel pédagogique de la conduite dans la nuit
3. Matériel pédagogique de freinage brusque
4. Matériel pédagogique de la conduite sur l'autoroute
5. Matériel pédagogique de particularités régionales
6. Matériel pédagogique de la conduite dans de mauvaises conditions |
Conformément à la certification standard pour le simulateur de conduite : Scénario standard
|
7. Matériel pédagogique de chaque infraction
8. Matériel pédagogique de la visibilité dans la nuit |
Composition du système
|
・Un PC pour le contrôle central
・Plusieurs ordinateurs pour le PC de simulateur de conduite
・Imprimante
※Tout est connecté par un réseau. |
Logiciel d'analyse, de total
|
・Logiciel d'analyse ・Logiciel de total |
|
 |
|
| Haut de page |
Humain ‒ Véhicule ‒ Flot de la circulation Système de la simulation interactive
Simulateur de conduite pour les recherches de haut niveau sur la plate-forme
de mouvement de six degré de liberté 0.7G |
|
FORUM8 a livré, le 22 mars 2012, le simulateur de conduite de haut niveau
''Humain ‒ Véhicule ‒ Flot de la circulation, Système de la simulation
interactive'' à l'école doctorale de l'université de Kyushu. On espère
que ce simulateur de conduite promouvra les recherches et l'éducation sur
l'automobile.

Livraison du simulateur de conduite de haut niveau à l'université de Kyushu
C'est un système de simulateur de conduite qui combine le simulateur de conduite, le simulateur de flot de la circulation, le simulateur de mouvement de véhicule, l'émulateur HILS/ECU, le dispositif pour la mesure de champ visuel, avec l'intégration par la réalité virtuelle, UC-win/Road.
Le 13 mai 2012, le simulateur de conduite a été ouvert au public à l'occasion de ''Festival de l'Université de Kyushu'' qui a eu lieu au campus d'Ito. 106 personnes ont utilisé le simulateur de conduite et les familles l'ont beaucoup aimé.
En mars 2012, FORUM8 a également livré le simulateur pour la recherche de haut niveau (6 degré de libertés, 5 chaînes) à la spécialité de l'ingénierie de l'école doctorale de l'université de Kyoto.
 |
 |
 |
 |
Journée portes ouvertes du système de la simulation interactive entre humain ‒ véhicule ‒ flot de la circulation
(Le 23 mars 2012, à l'université de Kyushu) |
|
|
|
| Haut de page |
8DOF Simulateur de sécurité routière |
|
Ce simulateur de conduite est un système que le département du transport
de la Chine a planifié pour la recherche de la sécurité routière. C'est
l'institut de la recherche d'autoroute du ministère des transports qui
a créé et construit la spécification de ce grand simulateur. A l'appel
d'offre internationale en 2009, seulement FORUM8 a reçu la commande et
nous avons effectué la livraison en février 2014.
|
|
| Haut de page |
| High Precision Driving Simulator for Vehicle Performance Analysis |
Ce simulateur de conduite est simulateur 3D stéréoscopique VR entraînement
5-écran première mondiale queincorpore de nombreux éléments tels que la
simulation de conduite, la simulation de la circulation, et la dynamique
du véhicule & amp; performances, en construisant sur le logiciel 3D
interactif VR UC-win / Road
FORUM8 aconstruit et livréce simulateurà l'intérieur del'innovationnationalede l'Universitéde NagoyaComplex(NIC)en Juin à 2015.
News record of UC-win/Road. BBC reported the World's First 4K Five-Screen
3D Stereoscopic Driving Simulator in Nagoya University's National Innovation
Complex (NIC).
Record Nouvelles de UC-win / Road. BBC a rapporté d'abord 4K Cinq-écran
de la 3D stéréoscopiques Driving Simulator dans l'innovation nationale
de l'Université de Nagoya Complexe (NIC)
(17 février 2016) (Youtube)
* En Juin2015,aucun grandsimulateur deCAVE5-écran a étéconnupour inclureaussi
un véritablecockpit,donccela estactuellementun véritable
|
UC-win/Road Système de personnalisation
|
|
- Système DS Super grand : 6 axes+lacet, X-Table et 8 projections de la circonférence entière, composition de cluster
- UC-win/Road Simulateur de bicyclette
- UC-win/Road Simulateur de fauteuil roulant
- UC-win/Road Simulateur de chemin de fer
- UC-win/Road Système d'étude du positionnement d'installation pour équipement de transport
- UC-win/Road Simulateur de pilotage de bateau
- Engin de chantier Interface Homme-machine
Développement souple, économique, de haut niveau par des modules subdivisés
●Facile à modifier/ajouter des modules (système de simulation de conduite)
Ce sont des exemples de personnalisation comme le changement de modèle de mouvement de
véhicule pour UC-win/Road, le changement par les utilisateurs vers le hardware, la sortie
d'historique de l'état de conduite. On calcule des mouvements de véhicules en saisissant la
quantité de la manipulation de pédale et de volant depuis un contrôleur de jeu. De plus, on calcule
l'accélération et la trajectoire de véhicule avec des modules indépendants. On peut ainsi adapter à
la demande, la personnalisation des modèles de mouvements de moteur de véhicule, le modèle
d'adhésion entre des roues et des surfaces de la route. On a assuré la coexistence du hardware et le contrôleur de jeu et est adapté aux équipements analogiques, en ajoutant ''Entrée des
équipements de pédales analogiques'' et ''Commutation d'entrée de manipulation de pédales''. On
peut maintenant obtenir et sortir des informations sur le simulateur de conduite grâce à l'ajout du
module ''Obtenir et enregistrer l'historique''.
Utilisation des fonctions avancées et des nouvelles fonctions en cours de
développement avec VR-StudioⓇ
●Développement de nouveaux modules/ utiliser en avance les fonctions des produits en cours de développement
Quand nous voudrions réaliser des nouvelles fonctions avec la personnalisation, nous développons des techniques de base nous-mêmes pour les utiliser comme nouvelles fonctions de progiciel. La fonction de scénario de course qui améliore la simulation de conduite est développée en profitant des savoirs-faire accumulés à travers des offres des personnalisations. Cette fonction sera équipée à la prochaine version. La fonction scénario permet de générer des événements, d'avoir des réactions de conducteurs, de développer de différentes histoires de conduite. Nous utilisons le langage Shaders pour la technologie de pointe de l'image numérique et développons des traitements de texture de terrain ou des expressions de haut niveau de sources de lumière.
Réalisation de la simulation de haut niveau par la coopération avec le hardware
●UC-win/Road Simulateur de conduite・plateforme de mouvement
Vous pouvez personnaliser le simulateur de conduite d'UC-win/Road, qui est typique pour la
coopération avec le hardware. Le ''plateforme de mouvement'' est un système plus perceptif et plus
réaliste qui est adapté au maximum aux 6 degrés de liberté. Le simulateur de conduite est
développé pour la recherche de l'automobile, le système de la sécurité, le simulateur pour
l'entraînement, le simulateur promotionnel, et utilisé pour le simulateur de chemin de fer. En
coopération avec le hardware, ce simulateur peut couvrir de différents besoins de la simulation, car
c'est un système qui, non seulement profite des points forts de la réalité virtuelle en temps réel en
3D, mais aussi peut créer et changer des espaces en 3D souple, réaliser des scénarios et contrôler
des événements. |
|
| Haut de page |
 |
●: Mixed Reality - Réalité mixte ●AR : Augmented
Reality - Réalité augmentée
Osaka modélisationde la ville et système de liaisonVR
Développement d'une méthode dela villePrésentation parLiaison d'unpoint
de vueentre le modèlephysique et VR
|
|
 |
Associez ProfesseurTomohiroFukuda
(Diplômé Lycée de Engineering,Université d'Osaka, Japon) |
|
| M. Fukuda a développé un mécanisme de lier un modèle physique 1/300 échelle
de Nakanoshima avec modèle VR, Osaka, montrant le modèle physique avec
un pointeur laser, Il y a un capteur pour lire et afficher en VR. Il a
introduit le système de connexion des avantages d'un modèle physique et
VR tout en démontrant le prototype. |
 |
|
 |
| IVR exposition 2010 |
|
La présentation de la 3e Internationale
Symposium VR |
|
Modèle de Cloud Shibuya et dispositif interactif
Développement du système de liaison pour les périphériques VR etinteractifs
|
|
 |
M. Taro Narahara
(Diplômé de Université de Harvard, Les États-Unis)
|
|
M.Narahara a mentionné un projetdans lequelil a présentéles actionscapturées
à partirde vraies personnesen mouvementsdechiffres,et représentedes chiffres
plus réalistessurUC-win / Road..
En outre, il a expliquéle mécanisme quipermet une interactionen temps réelen
reliantla simulation et UC-win / Roadsur une vraiebase de tempspar le développement
conjoint deplug-insavec FORUM8. |
 |
|
 |
| IVR exhibition 2010 |
|
La présentation de la 3e Internationale
Symposium VR |
|
| Face à Mont Système |
Avec la connexion du capteur et google à l'espace UC-win /Road,VR peut êtreaffiché à l'écrangoogleen calculant lemouvement de la têteprécise basée surlesmultiplessignaux de chaquecapteur.
VR simulateur est Plus réaliste,on peut construit par rapport à l'affichage normal en se connectant à conduire système de simulation et d'un système d'exposition.
| Capteur |
Lunettes |
Produits Polhemus
La position est calculée par l'acquisition de 6 informations d'axe avec
PATRIOT (acquisition de l'information 6 axes) capteur de générateur de
champ magnétique et l'unité de commande. |
Produits VUZIX iWear VR920 |
|
|
| Système stéréo 3D Stéréo System 3D oeil nu |
An example of system configuration Un exemple deconfiguration du système
Lunettes image 3dimensions.Composition d'undiorama et de l'imageen 3 dimensions est affichée.
Qu'est-ce que3DB-Vision?
Le 3D-B-Vision est une Réalité mélangé ou plus spécifiquement, une réalité augmentée(AR) système matérie.AR est de plus en pluspopulaire
en raison de sa fonctiondans la protectiondes informations numériques sur
le monde réel(physique). Et avec 3D-B-Vision, il y a l'avantage supplémentaire d'êtreen mesure de projeter les informations numériques sous forme de CGI3 Dstéréoscopiques. Informations peuvent affichées sur des modèles d'architecture ou d'autres objet sphysiques.Ce système glassless est atteint par l'utilisation de deux petits projecteurs,
placé oculaire certaine distance (pour les capacités stéréo 3D). Le participantre garde à traversune vue fenêtre transparentevers l'objetphysique,et avec l'utilisation d'unfiltred'écrand' argentet d'objectifen tête,l'image stéréo 3D peut être vuavecla configuration physique.
Avec UC-win/Road version 4, informations de simulation en temps réel peut se projeter.UC-win / Road
Ver.4 compris un plug-instéréo 3D qui peuventtirer pleinement parti des
capacitésde la 3D-B-Vision.Voitures, piétons, et d'autreséléments mobiles
peuvent être montrés agir ensemble pour une présentation efficace avec
projection stéréoscopiquede la 3D-B-Vision.
Avantages
- AvecUC-win / Road, les informations de simulation en temps réel peut utiliser avec 3D Stereo ne nécessite pas de lunettes polarisées
- Promouvoir de nouvelles discussions pour les projets
- Selon la taille du modèle physique, beaucoup peut être utilisé comme
«kiosques» avec des informations fort impact visuel variant avec le déplacement
de données
Développé par: Ishikawa Kougaku Zoukei Laboratory Co., Ltd. (http://www.holoart.co.jp/)
 |
 |
|
Vue normale stéréo3D |
|
|
| Haut de page |

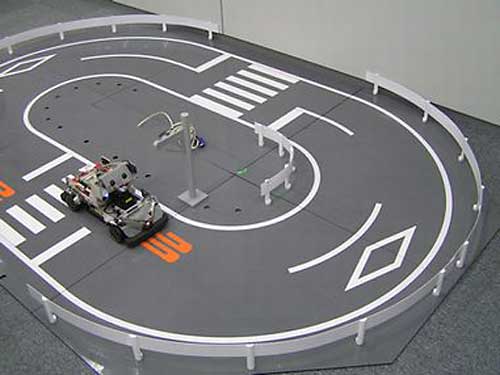
Plate-forme robotique automobile intégréeet la réalité virtuelle |
|
UC-win / Road permet la création degrande échelle Réalité virtuelle(VR)environnement
avec faciles àcomprendre les procédureset les opérations.Grâce à cette technologie, FORUM 8 est en mesure de fournir un large éventail de simulations en temps réel pour un large éventail de clients. Notre travail avec RoboCar® nous permet d'aller au-delà de VR et de fournir des simulations en réalité mixte (MR).
 RoboCar® RoboCar®
Avec l'avancement de la technologie automobile et de la Technologie Robotique,
intelligents véhicules de la prochaine génération partageront une variété
de technologies avec des robots mobiles autonomes.
Cette technologie de robot peut appliquer pour cette plate-forme de modèle
1/10 échelle utilisée pour la recherche initiale sur la mobilité autonome,
les communications intra-véhicule, l'interaction homme-véhicule et beaucoup
plus. De plus, nous fournirons ce système pour les universités, les entreprises
et autres organisations comme outil de formation des ingénieurs pour combler
l'écart entre l'industrie et les universitaires, à être utilisés pour des
études sur la théorie du contrôle et le contrôle automatique, et l'éducation
des processus de développement.
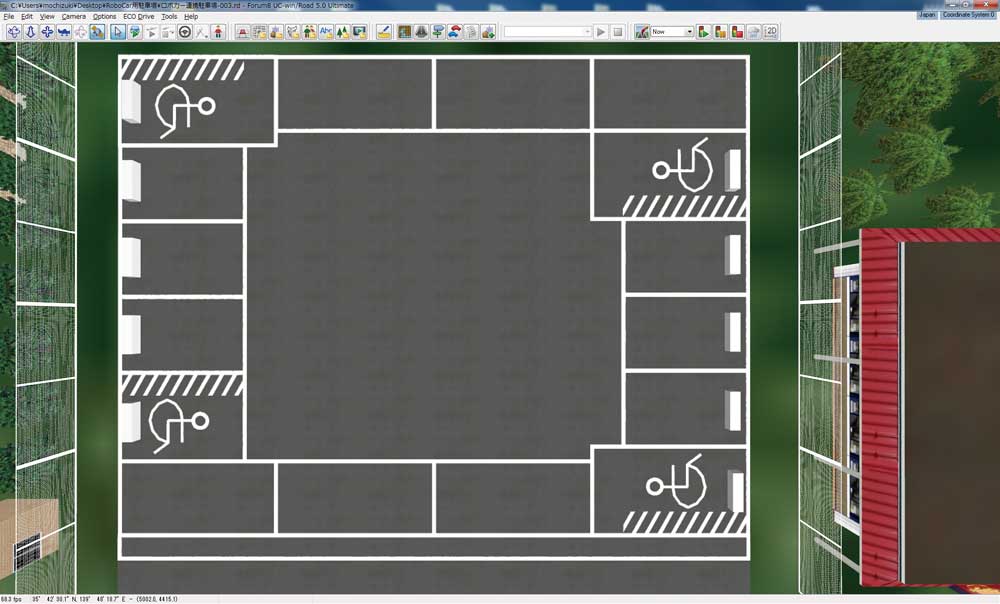
Combinaison d'UC-win/Road et RoboCar®
En UC-win / Road, représentation détaillée de l'espace 3D avec une grande
variété de situations de trafic et des scénarios peutachever, et les utilisateurs
peuvent conduire dans cet espace 3D librement et RoboCar & reg; est
un modèle 1/10 échelle de vraie voiture qui peut être entraîné autour de
la réalité physique. Avec la combinaison de ces deux produits, la simulation
dans des réalités multiples rendes possible pour les tests qui ne peuvent
pas être réalisées dans la réalité virtuelle.
 |
 |
 Créer un modèle de l'environnement de conduite (à droite), Créer un modèle de l'environnement de conduite (à droite),
et simuler la conduite à l'intérieur 3D VR (à gauche) |
|
|
| Haut de page |

FORUM8 Solution de stationnement |
|
FORUM8 provides a comprehensive solution to many areas of parking design
and visualization such as automatic parking system synchronized with RoboCar®,
search for vacant parking areas and a navigation system using VR-Cloud®
etc.
FORUM8 fournit une solution complèteà de nombreuxdomaines de la conceptionde
stationnementet de visualisationtels que le systèmede stationnement automatiquesynchronisé
avecRoboCar®,recherche dezones de stationnementvacants etun système de
navigationutilisantVR-Cloud®etc.
En outre, l'utilisateur peutcréer des modèlesde stationnementen utilisant
des informationsde dessin et desimulation 3DVR en connectant"Créationde
la trajectoiredu véhiculecartographie/dessinde stationnementet la conceptionCAD»
pour UC-win / Road. |
|
 |
|
| Haut de page |
Véhiculetrajectoire/ParkingCARsystème de stationnementautomatique |
|
Le dessin de la trajectoire du véhicule / Parking / système de stationnement
automatique
Simulation 3DV Rest obtenue en utilisantles informationsde dessin eten
liantla création de lacartographiede la trajectoireet la créationet la
conception duparking avecUC-win / Road.En outre,un systèmede stationnement
automatiqueest disponible à lasynchronisationdu modèleRV etRoboCar(R). |
|
- Système dedessinde trajectoiredu véhicule
Cela permet à l'utilisateur decalculer etdessinerla trajectoiredes véhiculessur
la base desthéoriesfigurativesde"Stylede l'angledroitde retournementdessintrajectoire
desemi-remorque etpleineremorque (JASOZOO6-92), la Société desingénieurs
de l'automobiledu Japon,INC."etc.
Simulateur de conduitesur les routes visualisées et les routes existantes
et véhicule tracteur trajectoire peut conduitee fficacement.
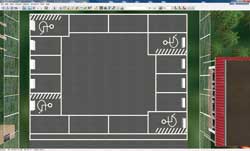
- Système de dessin Parking
C'est un système de CAO qui conçoit les parcs de stationnement sur la base
des normes de stationnement avec les théories figuratives de & quot;
Règlement de stationnement Standard & quot;
"Normes de conception de routes" etc. (Dessin vue en plan).
Il permet à l'utilisateur d'exporter le parking construit dessin aux données
de CAO qui peut utiliser dans votre "Mapping System Trajectoire véhicule".
- UC-win / Road RoboCar® Auto parking plug-in
Ce système permet le fonctionnement automatique d'un volant au moment du
stationnement sur la base des informations à partir d'une caméra ou un
capteur à ultrasons par liaison entre UC-win / Road et RoboCar (R). Le
parking peut être effectué automatiquement par le conducteur en appuyant
simplement sur le bouton extérieur de la voiture.
|
|
| Haut de page |

Parking Solution VR-Cloud® Parking NAVI |
|
E-Parking permet la réservation de places de stationnement par l'intermédiaire des bornes Internet, tels que les smartphones, etc. E-Parking résout donc le problème de la recherche d'un espace de
stationnement dans les zones urbaines occupées tandis Parking opérateurs
de Lot bénéficient d'une efficacité accrue.
Il n'a pas besoin de préparer les informations séparément parce que le
modèle VR y compris le stationnement est créé. En outre, l'affichage 2D
et l'affichage des informations de texte sera également possible si nécessaire.
* 1 ... Seul le terminal avec GPS est appliquée.
|
|
| Haut de page |
Technologie de développement de champ Robot de FORUM 8
GestureSimulationde conduite |
 |
AirDriving & UC-win/Road (posté sur '12.02.13) |
|
AirDriving & RoboCar (posté sur '12.01.06) |
|
Tokyo Game Show
6K Signalisation en temps réel VR UC-win Road Air Driving (posté sur '11.09.29) |
|
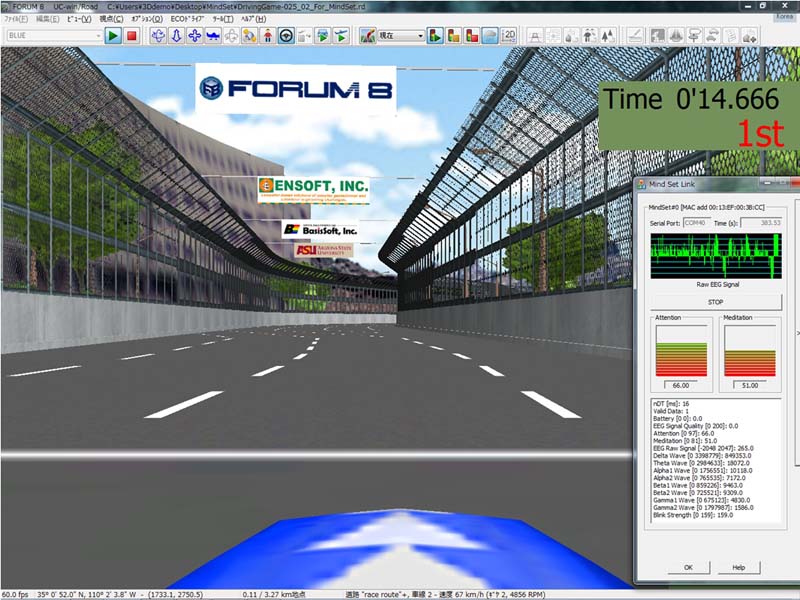
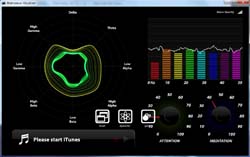
Occupez VR UC-win / Road pour MindSet
Liaison de Mindset Unité qui mesure l'activité cérébrale avec VR
| Enquêtesur le contrôleHandlessl |
Le premier dispositif que nous avons utilisé pour intégrer le contrôle handless est le MindSet de NeuroSky. Il est fondamentalement un casque Bluetooth avec la possibilité de mesurer l'activité cérébrale (EEG). Il dispose de deux écouteurs et un microphone.Trois électrodes sur le casque de l'oreille gauche et une électrode sur le front de l'utilisateur permet à l'appareil pour enregistrer un signal EEG brut caractérisant l'activité du cerveau de l'utilisateur.
De l'analyse du signal EEG brut, les composantes du signal peuvent être
extraites (ondes Alpha, vague Beta, vague Gamma, Delta vague, vague Theta),
ainsi que deux paramètres, le facteur de la méditation et le facteur de
l'attention. Chacun de ces facteurs caractérisent l'état d'esprit de l'utilisateur. Le facteur de médiation augmente lorsque l'utilisateur relâche alors que le facteur augmente Attention lorsque l'utilisateur se concentre son esprit sur une pensée spécifique.
 |
 |
MindSet Unité
(Neurosky) |
"Brainwave Vizualizer" (Neurosky) |
|
| Application : F1 Course |
Notre première application en utilisant la technologie à base EEG est une
course de Formule 1. A cet effet, nous avons développé une interface qui
permet de lire deux unités Mindset, en temps réel (@ 60Hz), avec extraction
de la méditation et des facteurs d'attention.
La course de F1 se déroule sur le circuit urbain de Phoenix en Arizona,
Etats-Unis. L'interface a été mis en œuvre en tant que serveur de sorte
que les deux joueurs peuvent courir sur des machines séparées.
L'accélération de la voiture est contrôlée par le paramètre Attention,
plus l'utilisateur peut se concentrer ses pensées, plus la voiture est
en mouvement. FORUM8 propose le système de recherche en utilisant des informations
biologiques des ondes cérébrales.
 |
 |
| Phoenix F1 Circuit |
Populaire commele systèmed'exposition
pour sonélément dejeu |
|
|
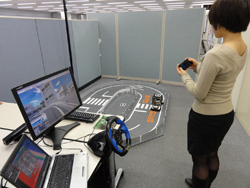
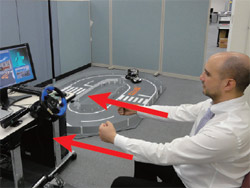
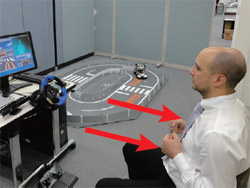
Kinect (TM) Simulateur de conduite
Simulationd'entraînementavec capteurinfrarougehandless
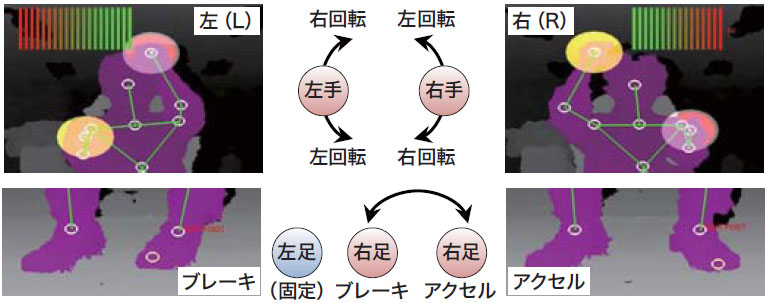
Ce système permet le fonctionnement de l'UC-win / Road en déplaçant les bras comme fonctionnant de la direction en face de Kinect (TM).
Les positions des deux bras qui sont détectés par Kinect (MC) sont convertis en direction, l'accélération, le freinage du véhicule.
Contrôle desvéhiculeset de l'imagede l'opérationde conduiteaveccapteur
infrarouge
Par la coopération avec UC-win / Road, ce système permet le fonctionnement
dans l'espace VR en déplaçant les bras avec la poignée de préhension virtuelle
en face de Kinect (TM). Les positions des deux bras qui sont détectés par
Kinect (MC) sont convertis en direction, l'accélération, le freinage du
véhicule.
 |
|
 |
| opération de direction (droit tournant, virage à gauche) |
 |
|
 |
| opération d'accélération |
|
Fonctionnement en freinage |
|
|
| Haut de page |
Multi-Cluster système de signalisation numérique avec capteur de profondeur infrarouge
Système 6K multiCluster Digital Signage |
|
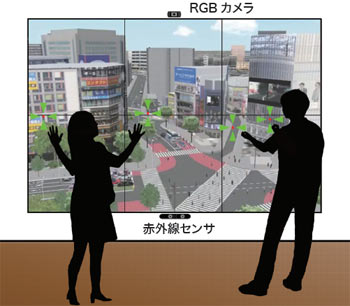
Système de multi-Cluster digital signage avec capteur de profondeur infrarouge
Le systèmed'affichage numériqueinteractifutilise unaffichage6Ksur les écransmultiples,
ainsi que lecapteur de profondeurinfrarouge.
 |
 |
signalisation AirDriving 6K numérique
(Tokyo Game Show2011) |
Interface AirDriving |
 |
|
 |
| 6 écransdepôlesignalisation |
|
Vue d'ensemble de Multi-Cluster système de signalisation numérique
avec capteur de profondeur infrarouge |
 |
|
Nouveau Service Solution "calcul haute performance sur le service
de Cloud"
Service d'analyse à grande échelle, simulation, CG rendu avec la fonction
de calcul avancé de calcul de haute performance |
| ■ UC-win/Road service de films CG |
Fichiers vidéohaute définitiongénérées parPOV-Rayest une caractéristique
deFORUM8'"informatiquede haute performancesur leservice de filmsnuageServices®CG.
Lefichier vidéohaute définitionpeut être assurée parl'utilisationd'un superordinateur.Étant
donné que lesfichiers vidéosont générés par POV-Ray,leursfichiers de scriptpeuvent
êtremodifiés à l'aided'un éditeur, etc Aprèslesfichiers vidéosont exportés
vers UC-win / Road. |
|
|
| Haut de page |
Technologie de développement de champ Robot de FORUM 8
La dernière technologiede la solutionen utilisantrobots |
|
Application UC-win/Road Air Driving
Il permet une opérationde conduitetrès détailléesans aucun dispositifde
contrôle.
|
Handless Simulation de conduite
via pôle signalisation avec 6 écrans |
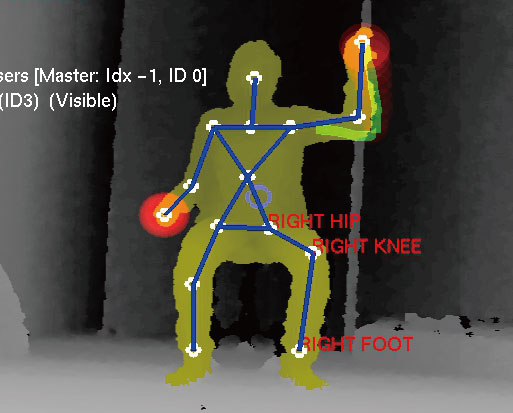
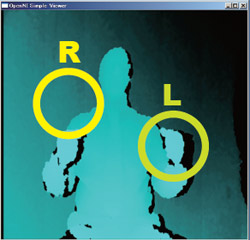
Reconnaissance du squelette
Le système est capable de reconnaître l'utilisateur de l'information sur
la distance détectée par un capteur de profondeur infrarouge et capable
de distinguer les caractéristiques humaines. En outre, il est calibré et
la structure du squelette est reconnu.
 |
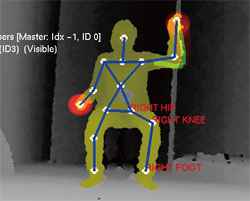 |
| Position de calibrage (à gauche) et ses résultats (à droite) |
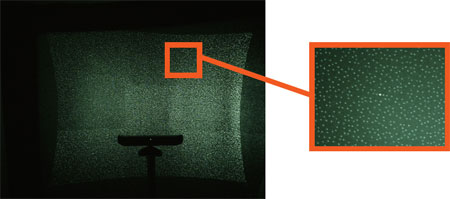
| Capteur de Kinect (TM) |
XtionPRO |
 |
 |
|
Positionde calibrage(à gauche)et ses résultats(à droite)
Kinectcapteur de profondeur(TM)infrarouge
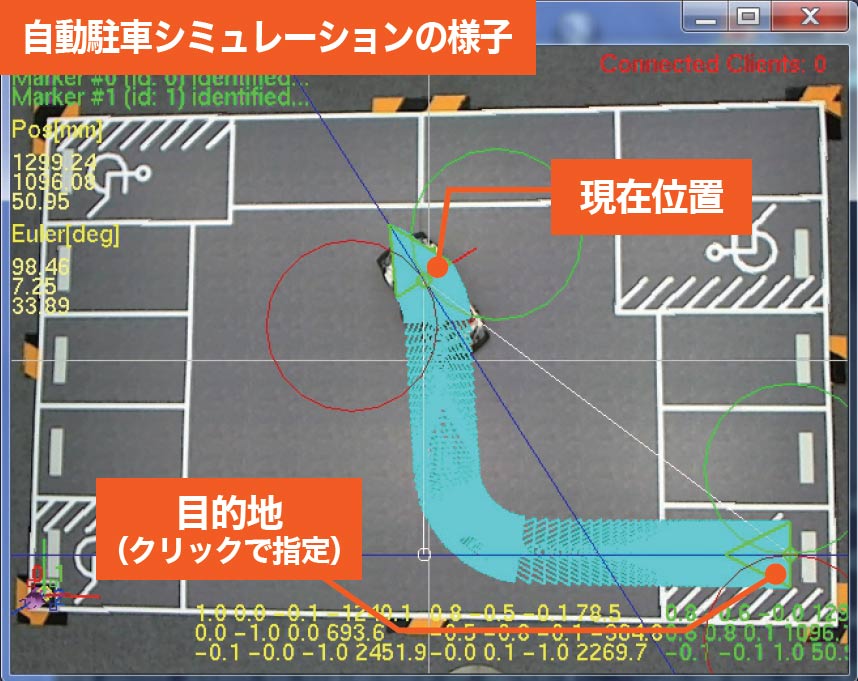
UC-win/Road RoboCar® Auto parking plugin
Ce système permet le fonctionnement automatique d'un volant au moment du
stationnement sur la base des informations à partir d'une caméra ou un
capteur à ultrasons par liaison entre UC-win / Road et Robocar®. Le parking
peut être effectué automatiquement par le conducteur en appuyant simplement
sur le bouton extérieur de la voiture.
- Synchronisation avecle modèlede l'UC-win / Roadla scène destationnement
automatique peut être vérifiéeenVR.
- Recherche de cheminet décision par AI : Intelligence artificielle
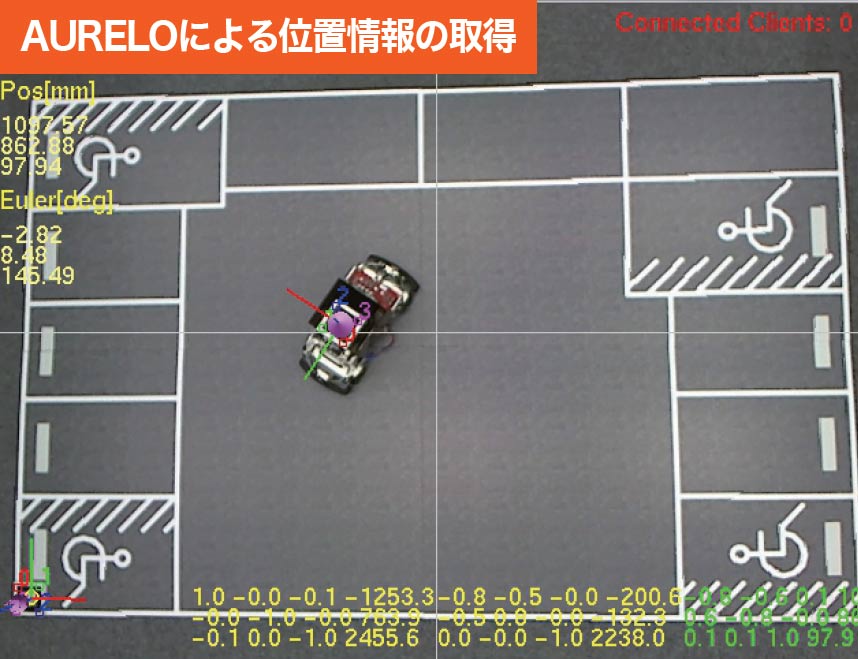
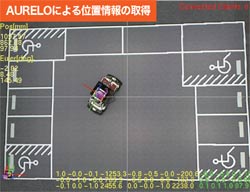
- RoboCar® position et l'orientation de l 'est basé sur AURELIO (Augmented
système réalité de localisation) et le point objectif de stationnement
est basé sur la carte de stationnement qui dispose d'un système de stationnement
automatique.
 |
 |
 |
| RoboCar® auto parking simulation via AURELO |
 |
 |
Scène de parking automatique
vérifié sur UC-win / Road |
La scène deparking
Elle est possible vérifiédans toutes les positions. |
AGUL AR.Drone
Projection de la gestion des terres agricoles à distance utilisant AR.Drone
système de personnalisation
AGUL est un système développé par la personnalisation AR. Drone (Parrot)
avec un but de soutien agricole.
AGUL confirme la situation des cultures et des ravageurs croissance et
soutient la gestion des terres agricoles en recueillant les informations
du ciel avec un appareil photo, capteur de température et capteur d'humidité.
Comme l'image environnante peut être transmise par la caméra montée en
temps réel. Agul peut éviter l'obstacle et peut être actionné à partir
du lieu éloigné, comme une maison.
- Communication avec l'avantest réalisé via WiFi
- Depuis l'ordinateur intégré contrôle l'équilibre automatiquement
- Confirmation avec une caméra et à haute vitesse caméra frontale et d'enregistrer
les détails avec l'appareil photo FLY-DV.
- Des mesures GPS où l'AR.Drone est.
- 9DOF IMU confirme la direction de vol AR.Drone en mesurant le taux d'accélération, gyro et le magnétisme de la terre.
- Le capteur de distance de rayon infrarouge permet d'éviter une collision avec obstacle en mesurant la distance entre l'avant.
 |
 |
 |
|
AGUL personnalisation |
Vol de Agul Test |
|
|
| Haut de page |

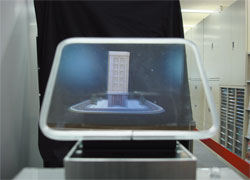
Système de simulation / de présentation en combinaison avec le modèle physique
et VR |
|
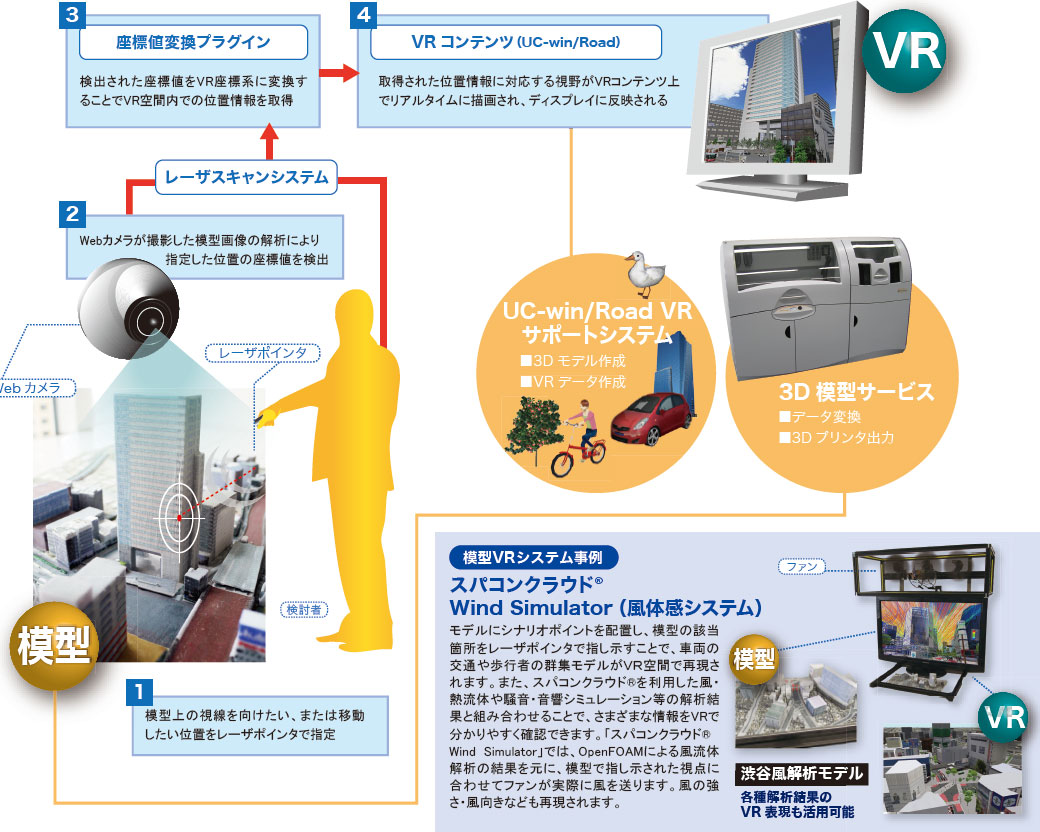
"UC-win/Road Physical Model and VR System" was developed based on the idea and cooperation of Associate Professor Tomohiro Fukuda of Osaka University, a member of W16. Thanks to the technology of providing a combined operation environment of physical model and VR system, it is a new type simulation/presentation tool combing the features of both environments. The system allows you to present information effectively and efficiently to the people concerned with different background and varying knowledge levels.
UC-win/Road Physical Model and VR System (Up&Coming '11 Verdure sortie)
"UC-win / Road modèle physique et le système VR" a développé sur la base de l'idée et de la coopération du Professeur agrégé Tomohiro Fukuda de l'Université d'Osaka, un membre de la W16. Grâce à la technologie de fournir un environnement de fonctionnement combiné de modèle physique et le système VR, il est une nouvelle simulation / outil de présentation de type peigner les caractéristiques des deux environnements. Le système vous permet de présenter efficacement des informations aux personnes concernées par les niveaux de connaissance différents horizons différents et.
UC-win / Road modèle physique et le système VR (Up & Coming '11 Verdure
sortie)
Support technique: Associez ProfesseurTomohiroFukuda,
Diplômé Lycée de Engineering,Université d'Osaka |
Outil pour l'examen des avantages à la fois le modèle physique et VR
Avantage de VR:VR est très flexible etexpressive, et permet diverses considérations telles
que la reproduction du flux de traficou de conditions météorologique sont
changé,ce qui est impossibleà travers un modèle physique.
Advantage of physical model : Physical model is more intuitive way to understand the overview of planning
including the distance and size. Physical model allows various people to
examine from the arbitrary viewpoints at the same time, understanding the
whole city model simultaneously and touching the model directly.
Avantage du modèle physique: physique modèle est plus intuitive pour comprendre l'aperçu de la planification,
et il compris la distance et la taille. Modèle physique permet diverses
personnes d'examiner du point de vue arbitraires dans le même temps, la
compréhension de l'ensemble du modèle de la ville en même temps et en touchant
directement le modèle.
Deciding the viewpoint under consideration ina physical model and displaying it in a VR model
The planning can be studied by easy and intuitive operation in comparison
with VR only. In "UC-win/Road Physical Model and VR System",
you can move in the VR space and make changes in the view direction by
indicating the view points to examine with laser pointer on the model.
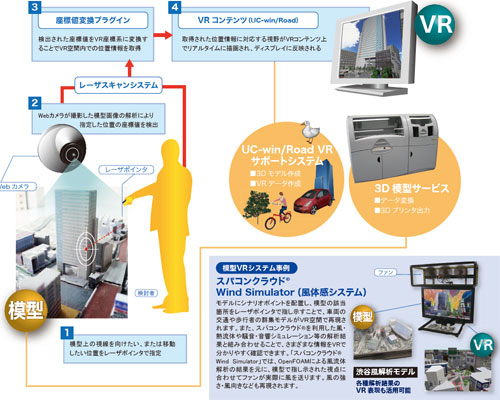
The system consists of model, web camera, laser pointer, VR software "UC-win/Road",
and display unit to view the VR display space. As a whole, the system consists
of two functions: detecting laser pointer operation, passing detected information
to UC-win/Road and representing it in VR space.
Déciderdu point de vue à l'étude dans un modèle physique et l'afficher
dans un modèleVR
La planificationpeut être étudiéepar une opérationfacile etintuitivepar
rapport àVRseulement.Dans"UC-win / Road modèle physiqueet le systèmeVR",vous
pouvez vous déplacerdans l'espace de VR et de fairedes changements dans
ladirection de la vueen indiquant lespoints de vue d'examiner avec pointeur
lasersur le modèle.Le système se composed'un modèle, caméra web, pointeur
laser, le logicie VR"UC-win / Road",et l'unité d'affichage pour
afficherl'e space d'affichageVR.Dans son ensemble, le systèmese compose
de deuxfonctions: détectionopération depointeur laser,transmission de l'informationdé
tectée à UC-win / Road et à le représenter dans l'espaceVR.
Modèle physiquesystèmeVR"SécuritéNakameguroet cartede sécurité»exposéedans
lasalle d'exposition
Le système VR demodèle physique de"cartede sécuritéet de la sécurité
Nakameguro"est exposée dans la salle d'exposition de FORUM8Tokyo siège.S'il
vous plaîtvenez nous rendre visite.
Proposal and quotation of system
FORUM8 will offer the proposal and quotation of "Système de soutien UC-win/Road" based on the requirements of each customer. With UC-win/Road Support
system, 3D VR simulation data can be created based on their needs. The
created VR data can be modeled by exporting VR data to the physical model
using 3D printer in a short time with "3D physical model service"
so that the physical modeled VR system can be effectively structured. Since
the created data can be produced as a 3D physical model by "3D modeling
service", customers can create Physical Model and VR System effectively.
Proposition et citation du système
FORUM8 offrira la proposition et citation de "Système de soutien UC-win/Road" sur la base des exigences de chaque client. Avec Système de soutien UC-win/Road , les données de simulation 3D VR peuvent créer en fonction de leurs besoins.
Les données créées VR peuvent être modélisées en exportant des données
VR au modèle physique en utilisant l'imprimante 3D dans un court laps de
temps avec "service de modèle physique 3D" pour que le système
VR modélisée physique peut être efficacement structuré. Étant donné que
les données créées peuvent être produites en tant que modèle physique 3D
par «service de modélisation 3D", les clients peuvent créer le modèle
physique et système VR efficacement.
| Exemple de devis: "Sécurité et sûreté Nakameguro carte"
modèle physique système VR |
Le système de proposition avec le modèle physique dans Nakameguro où FORUM8
est situé. L'état d'entretien de l'infrastructure dans le sous-sol et l'espace
intérieur du bâtiment peut être vérifiée comme "zone de sécurité et
de la sécurité la carte" où le modèle physique et VR sont intégrés,
et il peut utiliser pour la formation d'un consensus dans le projet ville
re-développement .
VR data creation : A propos de 2.700.000 Yen
3D création d'un modèle physique : Environ 3.600.000 Yen
* Il est compris le coût de la licence de ARToolKit, caméra Web, pointeur laser, ordinateur de bureau, écran 42inch, UC-win / Road Ver.5 avancée licence x1, la charge de la personnalisation de l'UC-win / Road, et les frais techniques
Total 11,600,000 Yen
 |
 |
 |
| sécurité Nakameguro map & quot; Présentation du mode VR |
La zone en face de la station Nakameguro |
Meguro Ginza
shopping Avenue |
 |
Coopération technique: Professeur associé Tomohiro Fukuda
de l'ingénierie de l'énergie environnement de l'Université d'Osaka |
|
|
|
| Haut de page |
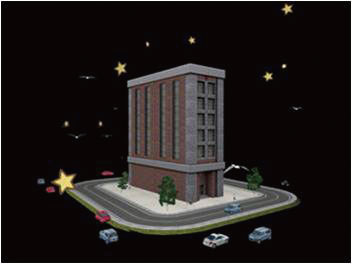
Projection Mapping 3D
La pratique consistant àprojeter une image surune structure physiqueet le contenuen utilisant la technologie 3DVR |
|
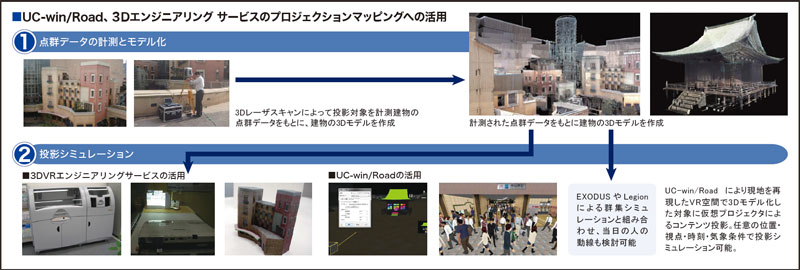
FORUM8 offers the state-of-the-art spatial visualization technology that
uses 3DVR data and image, namely the "3D Projection Mapping".
La pratique consistant à projeter une image sur une structure physique et le contenu en utilisant la technologie 3DVR.
 |
L'événement du Nouvel An dans le temple Meguro Enyuji en Décembre 2012.
<YouTubeURL> http://www.youtube.com/watch?v=JFqSbTxqxE4
Image fournie dans la courtoisie de l'organisateur
d'Eve l'événement Projection Mapping de la nouvelle année. |
| Vue d'ensemble de la 3DMapping Service de projection |
Projection Mapping is a cutting-edge image representation technique in which VR image is projected on a physical structure (3D structure) such as buildings, cars, and furniture using a projector. Projection Mapping is widely used in Europe as lighting in attract more tourists to resorts. The technology has many applications from drawing more people to events and stores, to revitalization of local towns.
Projection Mapping est une technique dereprésentation d'imagede pointe dans laquelle l'image VR est projetée surune structure physique(structure 3D)tels que des bâtiments, des voitures etdes meublesen utilisant unprojecteur.Projection Mappingest largement utiliséen Europe commel'éclairageàattirer plus de touristesvers les stations.La technologiea de nombreuses applicationsdedessinplus de gensà des événementset des magasins,à la revitalisationdesvilles locales.
Projection solution that uses VR

* Horaire peut varieren fonction de la spécification |
| Solutionde projection qui utiliseVR |
En exécutant une simulation de projection via le service d'ingénierie 3D UC-win / Road et, l'image peut être confirmée soit par lookign au modèle VR ou en exportant le modèle à un modèle miniature physique avant l'événement réel.
La solution est un outil idéal pour la vérification des contenus, la discussion avec les parties prenantes, l'explication et de la publicité pour le client, et des annonces de cours avant et après l'événement de projection.
| Un exemple de plan de projection de modèle |
Un exemple de plan
- Situation: Un endroit relativement sombre en plein air et relativement
facile à installer et à faire la cartographie de projection sans affecter
le trafic.
- Structure cible: Un bâtiment en forme de tour avec une géométrie simple
- La taille du bâtiment: : W10m x D6m x H20m
- Le matériel de construction: Briques (brun / opaque)
- Nombre d'emplacements à partir de laquelle l'image doit être projetée:
2 au plus
- Distance de projection: env. 15m (A: près) env. 40m (B: loin)
lumen plan deprojectio nvia un projecteur
10,000lumen a moins de luminosité et de la zone par rapport à 20.000 lumen.
20.000 lumen est généralement recommandé.
 |
|
| 2 projecteur sutilisés |
Liste des plans de projection de modèle (2D, 3D contenu)
* Coût des effets sonores: Le coût des dispositifs qui génèrent des effets sonores et le contenu des effets sonores, un total d'environ 10 000 $ est inclus.
* Inclut le contenu de l'animation 3D et des effets sonores
| Equipments |
1 projecteur |
2 projecteur |
| Projecteur projetant une image 10.000 lumen |
US$ 65,000 |
US$ 100,000 |
| Projecteur projetant une image 20.000 lumen |
US$ 75,000 |
US$ 90,000 |
- Le travail est d'env. 3 min. effets à long et comprend l'image et du son
(défini par l'utilisateur, MA)
- Durée de location de dispositif de génération de l'image et l'effet sonore:
3 jours (1 jour pour la préparation, 2 jours à l'événement)
- Comprend la gestion des tests et des progrès sur place
- Ingénieur de l'opérateur et de l'image / effet sonore disponible
- Transport / Voyage / hébergement payant pour les zones autres que la région
de Kanto (Tokyo et les préfectures environnantes)
- Le coût du stand et location de grues non inclus.
|
|
| Haut de page |
IM & VR
Solution intégrée via BIM / CIM VR |
|
Allplan, il est une solution BIM intégré develoed par un producteur de
logiciels de CAO allemand Nemetschek. Il est capable de concevoir et de
représenter diverses informations dans le cycle de vie d'un bâtiment, y
compris le dessin de base et détaillée, ce qui rend l'image, l'image de
présentation, métré, etc. FORUM8 va élargir leur gamme de solutions Allplan
comme un nouveau modèle d'affaires pour civile l'ingénierie et de l'industrie
de l'architecture.
|
|
| Haut de page |
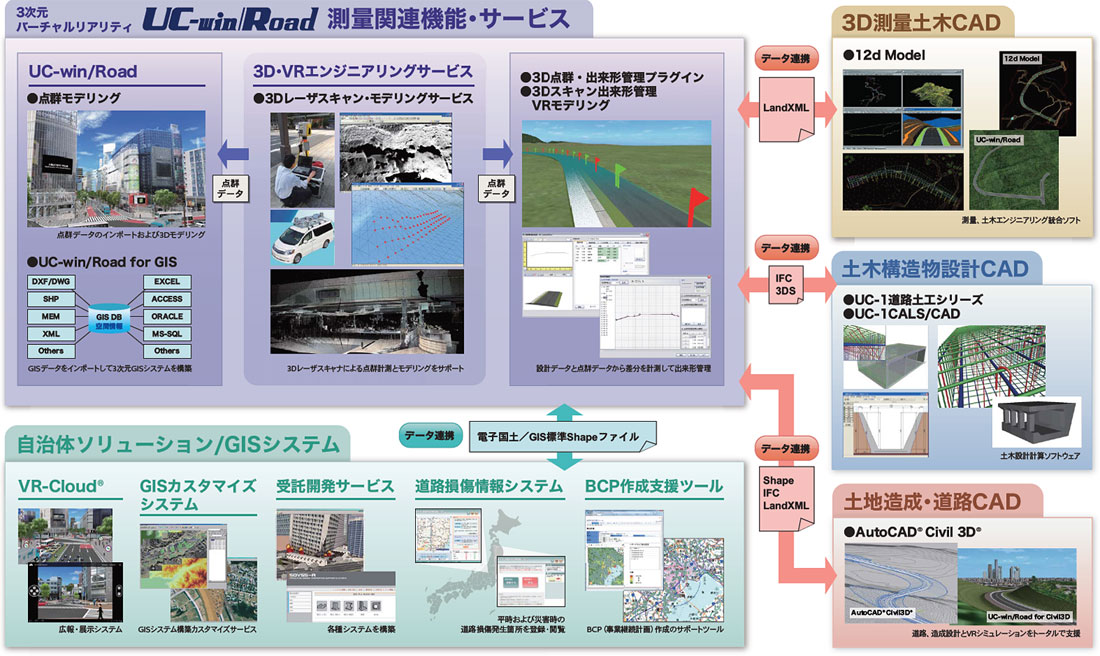
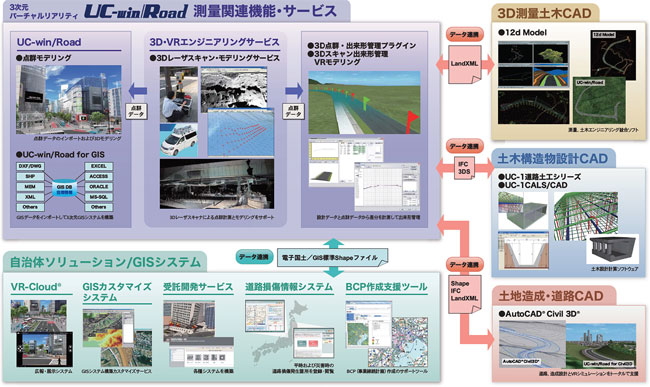
Solution Surveying
Des solutions intégrées qui impliquent des SIG / numérisation laser 3D
/ 3D Survey & Civil Engineering CAD
|
|
Nous offrons des solutions d'arpentage intégrées telles que le point de
mesure des nuages par scanner laser 3D et la modélisation VR des données
de nuages de points par l'intermédiaire d'UC-win / Road; échange de données
entre l'enquête de CAO 3D et la conception civile CAD de l'infrastructure,
et le système VR; et la construction d'un système qui relie les SIG à la
technologie VR.
 |
|
| Haut de page |
|
|