| UC-win/Road Point Cloud Data modeling |
|
| Data import of point cloud data and 3D modeling |
| Available on UC-win/Road Advanced: To be released March 2011 |
Simulation |
| New Products | |||||||
|
|||||||
| Preface |
| Point Cloud Data modeling is the plug-in option to utilize the information of tens of thousands of point cloud data collected by 3D laser scanner in UC-win/Road. It is available for a wide range of applications including modeling structures/ road development and measurement and survey of terrain and buildings data. We will now introduce the process and user interface of road creation using this plug-in option.
|
| Road creation process |
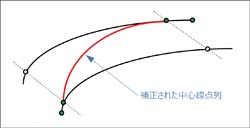
| To create roads in UC-win/Road, road alignment and road section data are necessary. Automated road creation with point cloud data allows highly precise data modeling and reduction of time and cost. There is a method of measuring point cloud data, suitable for the work is called MMS or Mobile Mapping System (referred as MMS below). This program extracts sequence of points from MMS Point Cloud Data from the center line and generates a road alignment and creates road easily by extracting and editing cross section of the road at an arbitrary point. Algorithm we have chosen to extract sequence of points on centerline is "normal lines search", aligning MMS Point Cloud Data on scanned plane and searching the next point by pointing according to an arbitrary point on the plane and its normal line. However, in some cases you cannot acquire the best sequence of points on center line. For example, this will be the case where the starting position is on the center line, however it is gradually deviating to the road shoulder. We have implemented point line revision function (Figure 2.3) to cope with this. t is the function to calculate sequence of points on center line by defining arbitrary two points, searching normal lines and arrange the provided 2 lines of point. With this method, you can acquire sequence of points on centerline as you like and can generate road with minimum input.
|
| User interface |
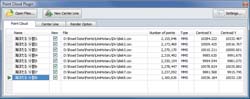
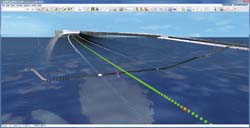
| User interface is aggregated to the main window (Figure 1) to realize quick access to the functions which is required for input and edit. Point Cloud Data imported is shown in table format. In a row in a table, you will find view switch, with which you can change view status of Point Cloud Data, by setting ON / OFF in the [View] check box. In the event that drawing speed slows down after importing multiple point cloud data files, it can be improved by hiding arbitrary point cloud data. With regards to the column of the center position, you can make parallel translation of point cloud data by changing the values. In the main window of UC-win/Road, editing the sequence of points can be done by mouse operation. Since selectable point is highlighted following mouse pointer, it can be recognized easily and prevents selection errors(Figure 4). Drawing option for point cloud data can be set on the main screen of the plug-in option. It allows smooth operation since the changes are reflected immediately and you can focus on editing work.
|
| Possible applications and related service |
Since technology of scanning terrain and structures in 3D is relatively new, many studies are being conducted today. We are planning to apply the technology for following works, giving feedback from our research result.
|
| Future development |
| This time we have introduced various options. We focused on features to create road and having the plug-in option include editing functions like move, rotate and scale. Please forward to client-oriented our future development. |
| (Up&Coming 2011 Early Spring Issue) | ||
 |