| New Products |
|
|
赤外線深度センサDTK
赤外線深度センサを使ったNUI開発キット |
|
●別途見積 |
●リリース 2012年1月
シミュレーション |
|
|
|
近年、新しいユーザインタフェースとして、NUI(Natural User Interface)の開発が盛んに行われています。NUIとは、声や体を使うことで直観的な操作を行う新しいインタフェースです。
DTK(Depth Tool Kit)は、赤外線深度センサを使ったNUIの開発キットになります。赤外線深度センサの距離情報からユーザを認識し、体の動きを3次元で取得します。通常のモーションキャプチャのように、体にセンサやマーカを付けなくてもよいことが利点の1つです。
|
DTKで使用可能なデバイスは、Xtion PRO, Xtion PRO LIVE, Kinect™の3つです(図1)。
いずれも赤外線深度センサにはPrimeSense™社の技術を使用しています。片側のレンズから赤外線のレーザを照射し、反対側のレンズで反射光を読み取ります(図2)。図1のセンサでは、緑色のレンズがレーザ、反対側が受光部になっています。
Xtion PRO、Kinect™の中央のレンズはRGBカメラです。Xtion PROは赤外線深度センサのみ搭載しています。
Xtion PRO LIVE及びKinect™はその他の機能を併せ持つ多機能デバイスです(表1)。
| XtionPRO |
Xtion PRO LIVE |
Kinect™センサ |
 |
 |
 |
| ■図1 赤外線深度センサ(Xtion PRO, Xtion PRO LIVE, Kinect™) |
 |
 |
| ■図2 赤外線レーザーパターン |
| 機能 |
Xtion PRO |
Xtion PRO LIVE |
Kinect™ |
| 赤外線深度センサ |
640×480(VGA)/30fps
320×240(QVGA)/60fps |
| RGBカメラ |
× |
1280×1024
(SXGA) |
640×480(VGA)/30fps
320×240(QVGA)/60fps |
| Audioマイク |
× |
2 |
4 |
| チルトモーター |
× |
× |
○ |
| 接続方式 |
USB2.0 |
USB2.0 |
USB2.0 |
| 電源供給 |
USBバスパワー |
USBバスパワー |
ACアダプター |
■表1 赤外線深度センサ機能比較
DTKでは赤外線深度センサとRGBカメラの機能をサポートします。赤外線深度センサの有効範囲は、Xtion
PRO, Xtion PRO LIVEで公称値0.8m〜3.5mです。Kinect™は公称値で1.2m〜3.5mとなっています。
|
DTKは赤外線深度センサーの利用を簡単にするツールキットです。深度マップ、RGBカメラ映像の取得はもちろん、ユーザの認識から3次元のモーション取得まで、命令を送るだけで簡単に行えます(図3)。複数のユーザを同時に認識・操作することも可能で、ジェスチャインタフェースや2Dメニュー作成機能を使えば、すぐに入力デバイスとして使用できます。

■図3 DTK(Depth ToolKit)の機能)
深度マップの情報や3次元のモーションデータを使い、まったく異なるアプリケーションを作成することも可能です。
|
DTKは言語やプラットフォームによらず使用できます(図4)。Visual Studio®など、C++ではクラスライブラリとして使用します。クラスとして宣言した後、必要なメンバ関数を呼び処理を行います。深度マップ、RGBカメラのデータの他、ジェスチャー入力などの処理ではイベントを返します。イベントに合った処理を記述することで、簡単に赤外線深度センサを使ったアプリケーションを作成できます。その他の言語・プラットフォームでは、UDP通信を使用したサーバーとして機能します。ユーザ側はクライアントプログラムとして、DTKと通信しながら赤外線深度センサの情報を利用します。別アプリケーションとして機能するため、言語やプラットフォームによらずDTKを使用できます。
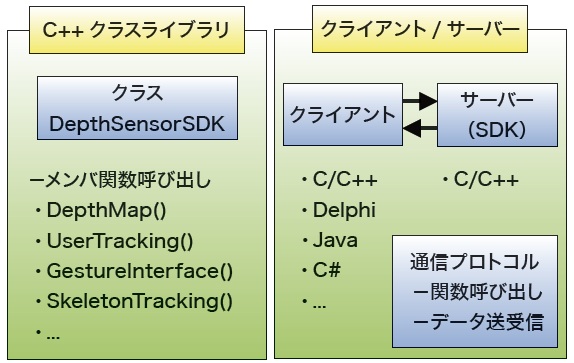
■図4 DTK使用方法
クライアント側は、UDPでサーバと接続した後、実行したい処理や必要な情報をDTKに送信します。DTKは要求に応じ、クライアントプログラムへデータを受け渡します。バックグラウンドプログラムとして使用するほか、深度マップやRGB画像の表示をDTK側で行わせることもできます。
|
| AirDriving &Gesture Interface |
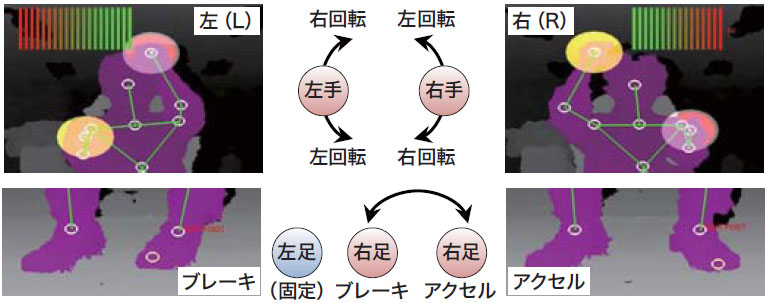
AirDriving & Gesture Interfaceは、3次元モーション入力とジェスチャー入力を組み合わせたハンドレスドライビングシステムです(図5)。赤外線深度センサから入力された手足の情報を使い、UC-win/Roadのモデルを走行します(図6)。ステアリング操作は、ハンドルを持つように両手を動かします。アクセル/ブレーキ操作はペダルを踏むように右足を動かし、つま先の左右でアクセル/ブレーキ、上下で踏込みの強さを表します。わずかな動きも認識するため、スムーズな運転が可能です。
 |
|
 |
| ■図5 AirDriving(東京ゲームショウ2011) |
|
■図6 AirDriving運転操作 |
ドライブ/バックの切替えはジェスチャで行います。ジェスチャの入力は、左手を固定した状態で、図7のように右手を動かします。AirDrivingではジェスチャの1番をドライブ、2番をバックとして使用します。シナリオなどにその他のジェスチャを割り当てることで、マウス・キーボードを使うことなく運転開始から終了まで操作できます。
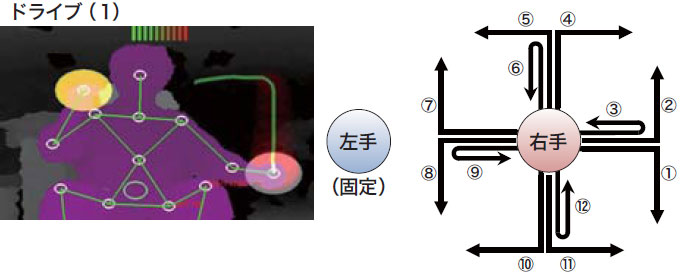
■図7 AirDriving ドライブ(1)/バック(2)
|
フォーラムエイトではAirDrivingを始め、ロボットのテレオペレーションなど赤外線深度センサを利用したアプリケーションを開発しています(表2、3)。
| アプリケーション |
赤外線深度センサの用途 |
| A)シミュレータ |
| AirDriving |
ハンドレスドライビング |
| B)テレオペレーション |
| RoboCar® |
ドライビングコントロール |
| AGUL AR.Drone |
フライングコントロール |
| ロボットアーム |
モーションコントロール |
| SLAM |
3Dマッピング |
■表2 赤外線深度センサを使用したアプリケーション
| 機能 |
AirDriving |
RoboCar® |
AGUL AR.Drone |
ロボットアーム |
SLAM |
| 深度マップ |
○ |
○ |
○ |
○ |
○ |
| RGBストリーム映像 |
× |
× |
× |
× |
○ |
| ユーザースペース |
○ |
○ |
○ |
○ |
× |
| 3Dモーションキャプチャー |
○ |
○ |
○ |
○ |
× |
| Gesture Interface |
× |
○ |
○ |
○ |
× |
■表3 各アプリケーションの赤外線深度センサ利用形態
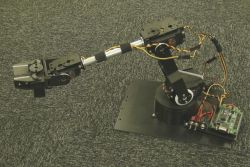
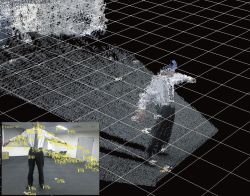
RoboCar®はZMP社の1/10スケールモデルカーです。AirDrivingとジェスチャインタフェースを使い、UC-win/RoadとRoboCar®を同期した走行シミュレーションを行います。AGUL AR.Drone(P9,Up&Coming 95号)はParrot社のクアッドコプターです(図8)。安定した飛行が可能で、空中からの写真撮影などに活用できます。AGUL AR.Droneやロボットアーム(図9)も3DモーションキャプチャとGestureInterfaceを使い制御できます。SLAM(Simultaneous Localization And Mapping)は自己位置推定と環境地図作成を同時に行うシステムです(図10)。赤外線深度センサの距離情報とRGBカメラのカラー情報の合成によりリアルタイムに3次元点群モデル(環境地図)を作成し、取得した映像を逐次比較して1つの連続した空間を生成します(自己位置推定)。これはロボットの制御や3Dマッピングに使用します。
 |
 |
 |
| ■図8 AGUL AR.Drone(Parrot社) |
■図9 アームロボット AL5D(Lynxmotion社) |
■図10 SLAMを使用した
3Dスキャニング |
DTKはこのようなアプリケーションの開発をサポートしています。 |
|


>> 製品総合カタログ
>> プレミアム会員サービス
>> ファイナンシャルサポート
|



