Academy User by Ieiri Lab. vol.2
埼玉工业大学
工学部机械工学科下山研究室
追求容易驾驶的车辆和道路的关系
道路交通的课题利用驾驶模拟器来处理
Academy Information
埼玉工业大学 工学部机械工学部 人间中心设计工学研究室URL ● http://www.sit.ac.jp/laboguide/kougaku/kikaikougaku.html#anchor06
所在地●埼玉县深谷市普济寺1690番地
研 究内容●活用驾驶模拟器,充分考虑人类和机械两方面「Human Centre Design(以人为本)的研究」。主要研究课题是安全的使用简单方便的驾驶支援系统,驾驶员的驾驶特性和高性能车辆设计等。
埼玉工业大学工学部机械工学科的下山研究室的研究方向是「对人来说容易驾驶的汽车和道路该有的方式」的「人间中心设计工学」。为了解决驾驶员的高龄化和自动 驾驶系统等的可以,在下山修教授的领导下,使用FORUM8的实时虚拟现实系统「UC-win/Road」和驾驶模拟器,进行了许多在实车中无法进行的实 验,并取得显著成果。

▲埼玉工业大学校区
考虑人类和机械两方面的「以人为本的设计」

▲使用UC-win/Road进行研究的琦玉工业大学
以人为本设计工学研究室的实验室。左边是下山修教授
近年来,由于少子高龄化使驾驶员年龄出现高龄化并且出现女性驾驶员的增加,驾驶员的能力和经验不一,车种类型逐日增加,是道路及驾驶运行的研究等变得更为复杂。
另一方面,IT(信息通信技术)使汽车行业的发展日新月异。最近更研发出防止与前方车辆发生冲突的自动刹车和可自动回避步行者的自动转向回避操舵、以及无需方向盘,加速器和刹车等,可自动驾驶的驾驶车辆陆续开发,还搭载在实车当中。
在此背景下,琦玉大学工学部机械工学科的下山研究室当中,以下山教授为中心,进行包括汽车技术的高度化,汽车真正为人起到作用,在使用过 程中不会出现任何问题等,考虑到人的行动和反映等的研究。这就是考虑人类和机械两方面的「human center design (以人为本的设计)」这个专业领域。
下山研究室中作为研究工具当中最不可缺少的是FORUM8的实时虚拟情境系统「UC-win/Road」和驾驶模拟器等。
下 山教授说,「在东京大学生产技术研究所的博士课程进行研究时,与东大的建筑学科一起进行临街店铺的是否容易进入是与板的大小和配置,以及停车场的形状如何改变等进 行过共同研究。自从与『UC-win/Road』相遇以来,『UC-win/Road』就成为在研究过程中最不可或缺的研究工具之一。」
实车当中无法进行的实验可行化
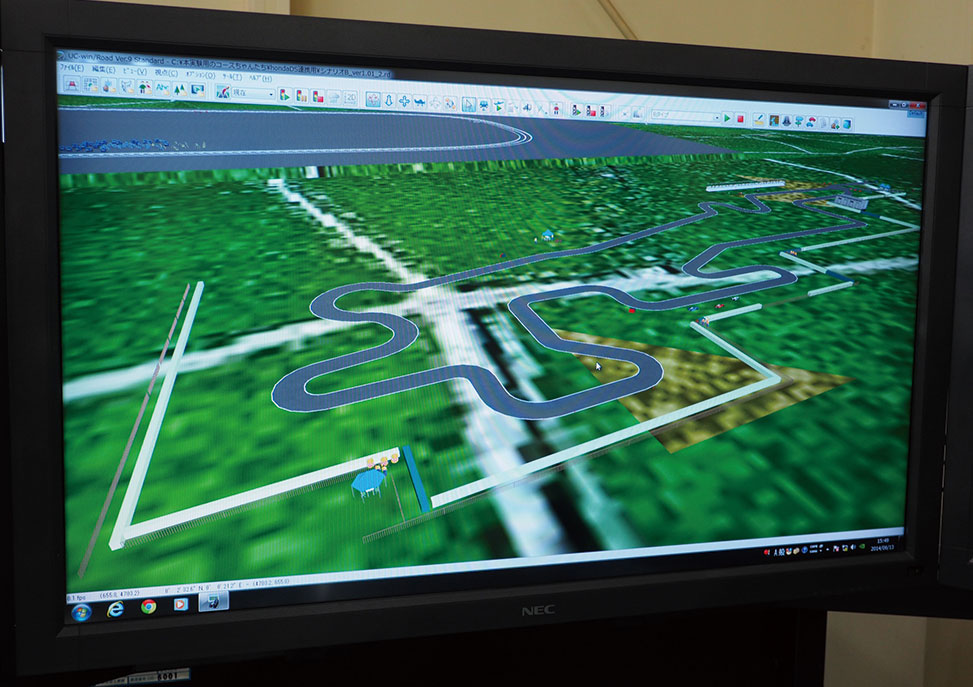
▲UC-win/Road当中制作的实验用course
在研究当中最为重要的是,在同等条件下对性别和年龄,驾驶经验等不同的被实验者进行的驾驶行动进行比较。同等条件包括有太阳的位置,路面的温度等气候自然条件等,周围车辆的数量和速度,步行者的人数等交通条件,路面温度等。
即使不在同一时期进行实验的同一被实验者在进行同种实验时要求必修与进行实验时同一条件。
并且,还遇到诸如针对步行者的突然出现或者前方车辆突然刹车等伴随着危险的反映等在实车当中很难进行的实验问题等。
而琦引进UC-win/Road和驾驶模拟器等使之前在实际道路和实车当中无法进行的实验成为可能。
下山修教授说「驾驶模拟器是本田制造的驾驶模拟器,在5年前引进。使用UC-win/Road和驾驶模拟器,可以自由设置道路的线形和天气,交通量等条件。每次都可以根据同一条件进行实验。对研究起到非常大的作用」。
车间距离要如何传达给人
 ▲下山研究室的研究当中引进UC-win/Road和驾驶模拟器 |
 ▲6轴以表现车辆的倾斜,加速度和梯度。 | |
 ▲还可再现门镜画像 |
自动刹车和自动驾驶等,现在驾驶支援系统的发展可谓日新月异。但是对系统的依存和过信也是导致事故发生的原因之一。驾驶员更加方便得了解车间距离需要何种方法有效和使用UC-win/Road进行「车间距离直觉接口的研究」。
驾驶模拟器的仪表盘当中(1)使用现代汽车中经常用于表示的汽车图像和横杆的标记来表示车间距离(2)根据车间距离的大小用微笑的表情到不安的表情「头像」,判断哪个更好明白。
「虽然现在自动驾驶系统进入实用化,行走速度和在旁边行走的油罐车等的影响都有出现错误动作的例子。使用驾驶模拟器进行实验,即使交通事故发生了也是安全的,被实验者在同样条件下可进行驾驶,还可确保再现性」(下山教授)。
被实验者当中19-33岁的男性9人,根据驾驶经验超过4年以上(A群、7人)和4年未满(B群、2栏)的标志和网络虚拟形象的不同来表示位置,还可根据现行车辆的动作不同分为5个场景,并在其他的条件等进行反复试验。
其结果是,驾驶经验较少的驾驶员的网络虚拟头像的表象更加简明易懂,可以判断出表示位置无论在驾驶员的中央和右侧都没有发生改变。人的表情可以简单表现人的意识,对表情的变化也很敏感。
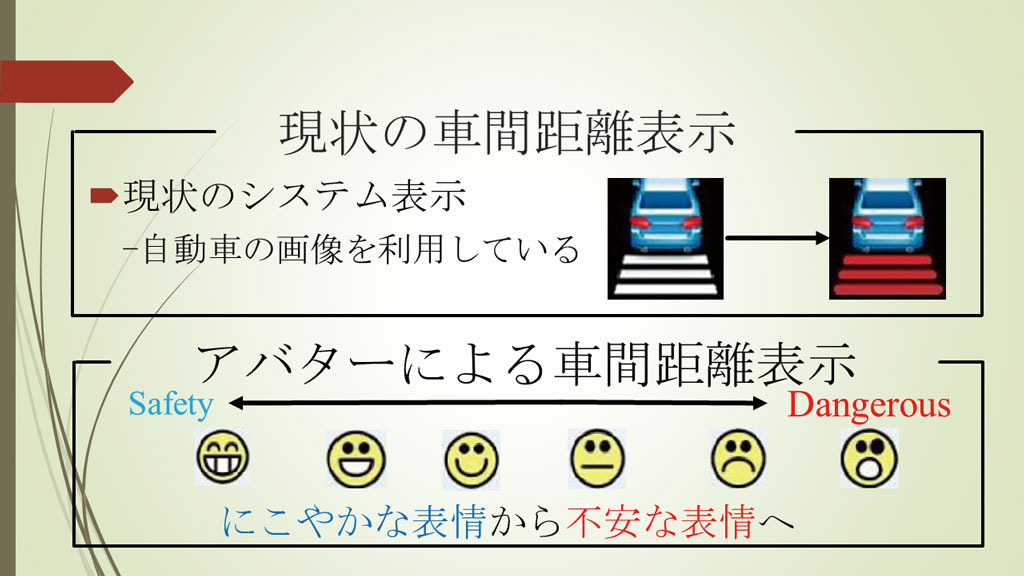
▲汽车的画像(上段)和 网络虚拟头像(下段)来表示车间距离 |
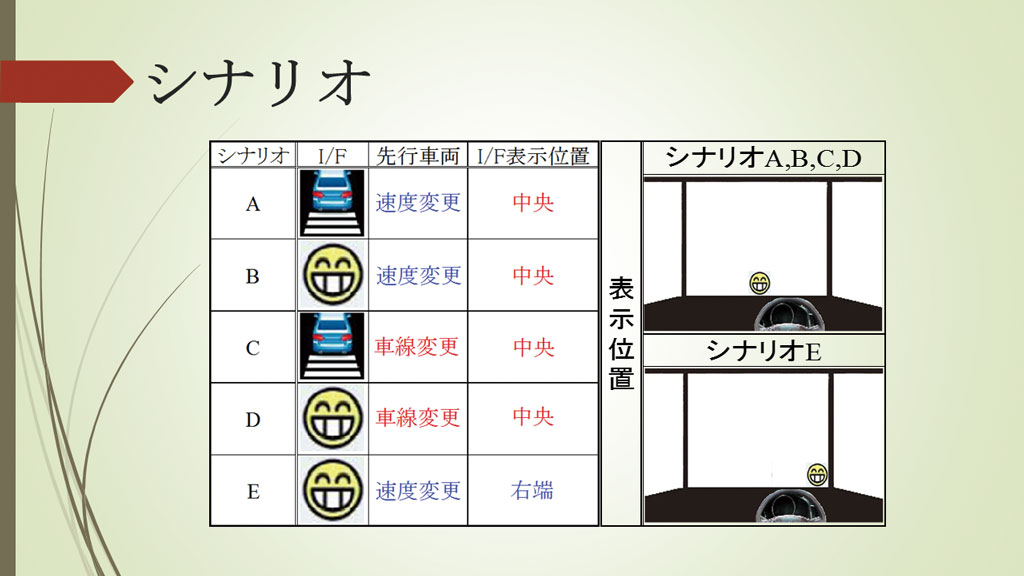 ▲表示车间距离的标志的种类和表示位置,可以改变先行车辆动作等的场景 |
在驾驶支援中活用路面标志
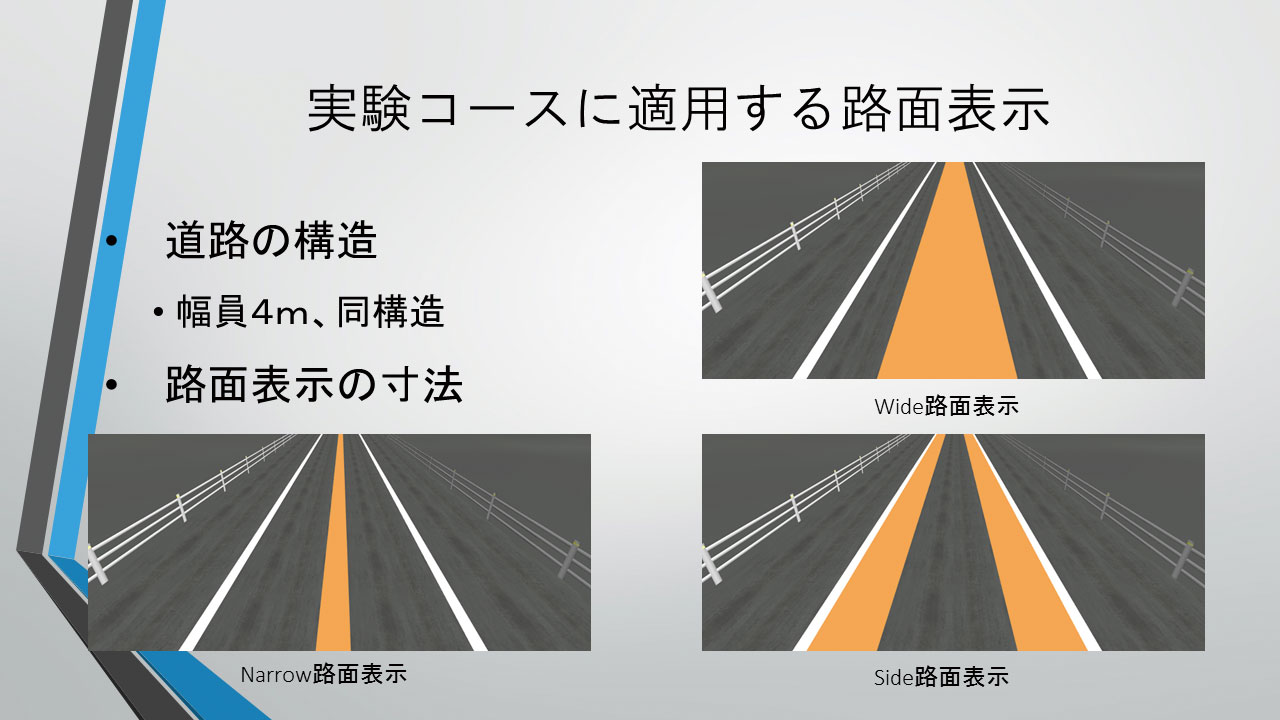 ▲准备了3种类的路面标示 |
 ▲使用驾驶模拟器在UC-win/Road制作的实验道路中驾驶的被实验者 |
自动刹车和自动维持车线的「车道保持辅助系统」等系统普及之后,驾驶员等的系统普及之后,驾驶员有可能依存于驾驶,丧失驾驶的主体性。最近高龄者和初学者的事故增加,初学者曲线的事故发生率是全驾驶员的1.6倍。
在这里,下山研究室还进行「使用路面表示的驾驶支援」。半径20m、25m、 100m的3种类的曲线和直线的组合进行1周2650m的实验课程在UC-win/Road中模型化,使用驾驶模拟器使被实验者分别驾驶4周的实验。
道路宽度设置为4m,还准备了路面标示的车道中央部上画有橙色带的「Wide」,细带的「Narrow」、以及在车道两侧准备了「Side」等3个种类。
并且使用UC-win/Road驾驶时驾驶员的驾驶轨迹和方向盘的操作量等,记录各种各样的数据,计算车辆位置偏差面积。
根 据数据分析的结果,速度30km/h、曲率半径20m的低速小半径的曲线当中「Side路面表示」的驾驶支援最为有效。并且对于驾驶频度在一周一圈,年间 驾驶距离1000km以下的驾驶经验缺乏的驾驶员来说是很有效果的。进行Side路面标示使每周车道的偏移量倾向稳定。
除此之外,还进行驾驶员的心跳数和脑的血流在驾驶中如何进行变化等实验。
 ▲被实验者装上测试脑的血流量和心拍数感应器 |
 ▲测试血流量和心拍数数据 |
 ▲伴随着测定数据的增加、有时需要数人参加实验 |
 ▲实验室当中进行讨论的下山研的成员和下山教授(右端) |
在研究中活用赛车手的经验
下 山教授在学生时代起就被称为 “比赛之魔”。在学生时代起就作为赛车手活跃于赛车场上。并在上一份工作日产汽车的时代一入社就被分配到赛车队。在那之后,被分配到该公司的中央研究所, 作为技术开发者进行赛车的设计,4WD车和研究设计。调动到同社的中央研究所之后,集中研究「如何实现人人类容易驾驶的特性」。
下山教授在2012年调动到现在的琦玉工大工作。作为赛车驾驶员的实际经验现在也很好的应用在实际的实验当中。不单是增加硬件和软件的性能,研究开发的中心目的一直是开发出对人类来说使用简单方便的汽车的开发。
下山教授现在仍然在从事与赛车关联的工作。2011~12年担任全日本学生公式大会的实行委员长之外,还指导在大会当中出场的琦玉大工大队。
今 年开始进行自动驾驶的操作手册游戏化的研究。下山教授说「想要熟练掌握自动驾驶系统,不单是直接交给自动驾驶,还必须考虑自动驾驶和手动驾驶的切换,自动 驾驶化范围的设置等,根据技巧和知识扩展使用范围。这过程与游戏的过关过程类似。这种思考方法在自动驾驶的手册当中可以进行应用」。
根据可把理论转化实际现象进行再现的UC-win/Road和驾驶模拟器,下山研究室现在所进行的研究主题可谓是潜力无限。今后大家也请期待其独特的实践成果。

▲全日本学生公式大会上出现的琦玉工大队的小型赛车