 UC-win/Road
Drive Simulator UC-win/Road
Drive Simulator
Hệ thống đóng gói thiết
bị mô phỏng lái xe 4 bánh.
|
|
Nó cho phép bạn tạo
một số tình huống lái xe và tạo lại
nó dưới sự kiểm soát hoàn toàn. Gần
đây Driving Simulator được sử dụng
rộng rãi cho nghiên cứu hệ thống xe
cộ hay nghiên cứu tương tác giữa các
lái xe, đường và giao thông, trên hệ
thống điều khiển giao thông thông
minh ITS.
- Môi trường lái xe trong mô
hình 3D có thể thoải mãi được
tạo thông qua UC-win/Road
- Chương trình nhúng chuẩn đã
bao gồm
- Dữ liệu tiêu chuẩn VR là miễn
phí và kịch bản tùy ý được hỗ
trợ
- Các môi trường khác nhau có
thể được sao chép thông qua công
cụ tùy chọn trực quan.
- Giá cả hợp lý sản xuất OEM.
- Tùy biến hỗ trợ nhu cầu mô
phỏng cao.
|
 |
|
|
Page Top
 |
UC-win/Road
Experience Simulator
6 đơn vị trục
chuyển động/Thiết Bị Mô Phỏng Lái Xe Subaru
|
|
| Dựa trên công nghệ
ô tô Sabaru, phần thân thiết bị mô
phỏng thông qua 6 đơn vị chuyển
động (đã có bằng sáng chế) được
phát triển bởi việc kết hợp công
nghệ mô phỏng bay từ bộ phận hàng
không vũ trụ Fuji Heavy Industries
và công nghệ ô tô từ ô tô Subaru.
Sử dụng cơ chế lái xe thực tế đưa
cho bạn một cảm giác thực trong
khi lái xe. UC-win/Road Experience
Simulator cho phép bạn mô phỏng
môi trường lái xe phù hợp với công
nghệ xe an toàn cải tiến nhanh
chóng của công nghệ ITS (tránh va
chạm, giảm tác động, vv). |
|
 |
|
|
| Page Top
|
Highway
Driving Simulator
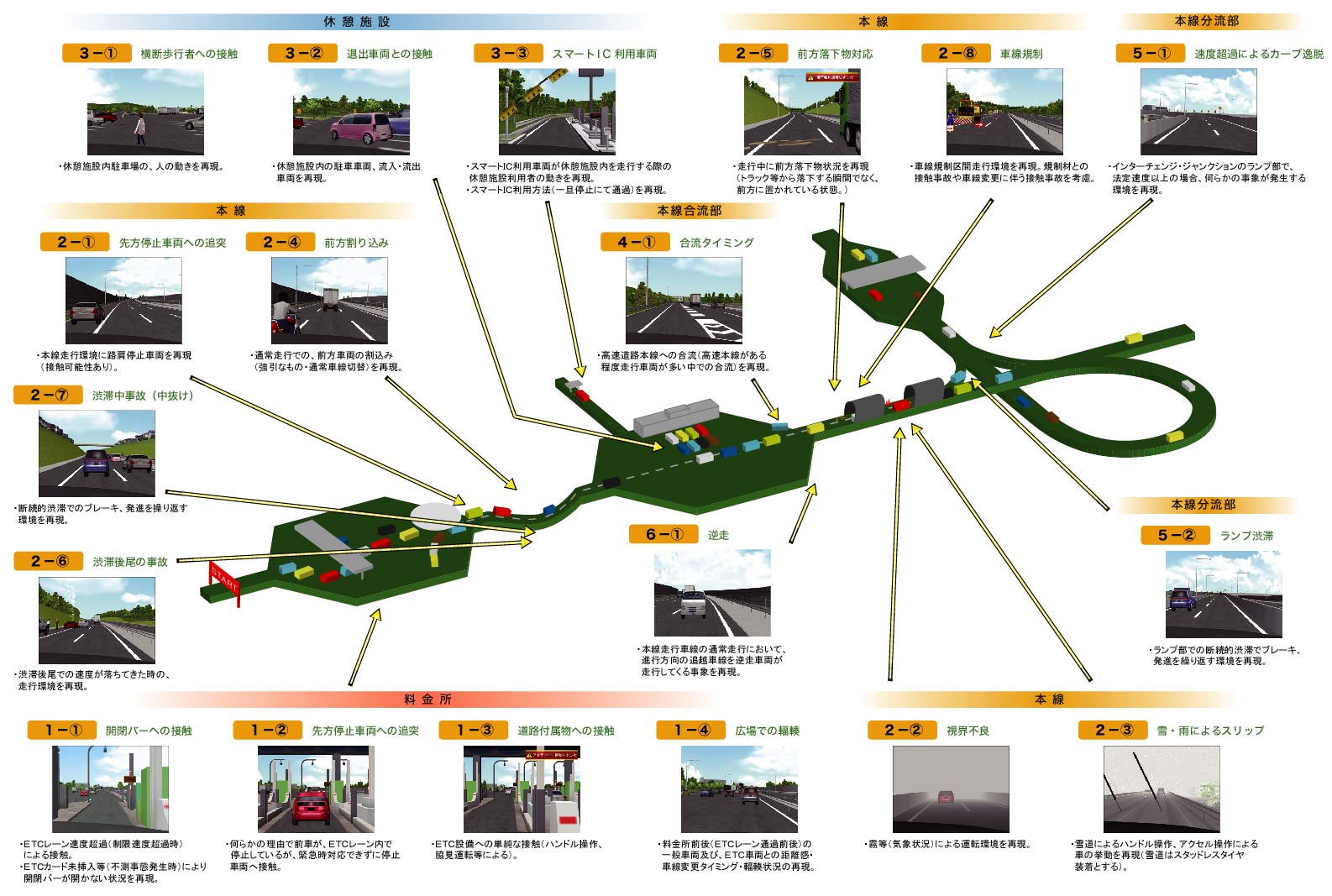
Mối nguy hiểm tiềm tàng trên
đường cao tốc có thể được tái hiện bởi thiết bị mô
phỏng lái xe.
|
|
FORUM 8 đã cài đặt tùy chỉnh Highway
Driving Simulator đến Hội nghị Sự Đóng Góp
Xã Hội của Đường Cao Tốc vào ngày 01 tháng
ba năm 2010. Sự mô phỏng này thực sự đã được
sử dụng cho một số sự kiện và triển lãm cho
đường cao tốc và cơ sở của nó.
Thiết bị mô phỏng này đã được phát triển dựa
trên các giải thưởng phần mềm thực tại ảo
UC-win/Road 3D, với nó người lái xe có thể
trải nghiệm các mối nguy hiểm tiềm tàn trên
đường cao tốc, 3 kịch bản kết hợp với 19 sự
kiện có thể được thiết lập và thiết bị mô
phỏng này xuất ra bảng chuẩn đoán lái xe
theo biểu đồ lái xe... Phần cứng của thiết
bị mô phỏng sử dụng nền tảng chuyển động 6
DOF với tùy chọn các bộ phận thực của ô tô
được làm bởi SUBARU.
- Trải qua 19 sự kiện nguy hiểm trên
đường cao tốc và các cơ sở của nó
- Hạng mục sự kiện để thiết lập kinh
nghiệm lái xe
- Phần cứng: 6 đơn vị trục chuyển động /
Thiết bị mô phỏng lái xe
|
 |
|
| Page Top
|
UC-win/Road
Safety Driving Simulator
Driving
simulator for driving school according to
certification standards for driving
simulator(Uncertified) |
|
Dựa trên các tiêu chuẩn chứng nhận
cho thiết bị mô phỏng lái xe.
|
1. Nhận thức mối nguy hiểm
2. Lái xe ban đêm
3. Phanh gấp
4. Lái xe trên đường cao tốc
5. Điều kiện vị trí cụ
thể.
6. Lái xe trong điều kiện xấu. |
Những kịch bản tùy chọn.
|
7. Xác định hành vi vi phạm
8. Khả năng hiển
thị ban đêm |
Cấu hình hệ thống
|
- Máy tính cho điều khiển trung
tâm - Các máy tính cho
mô phỏng lái xe
- Máy tin
*Tất cả được kết nối trong một mạng |
Chuẩn đoán/ Chương trình tập hợp dữ
liệu
|
- Phần mềm chuẩn đoán
- Phần mềm tập hợp dữ liệu |
|
 |
|
| Page Top
|
Human-Vehicle-Traffic
Flow Interoperable Driving Simulation System for
Interactive Information Exchange
Driving simulator with 6
degrees of freedom 0.7G motion platform for highly
sophisticated research purposes |
|
FORUM8 đã chuyển thiết bị mô phỏng lái xe
cho mục đích nghiên cứu như là
"Human-Vehicle-Traffic Flow Interoperable
Driving Simulation System for Interactive
Information Exchange" đến trường Đại học
Kyushu của lĩnh vực khoa học tích hợp vào
ngày 22 tháng ba năm 2012. Thiết bị mô phỏng
lái xe sẽ trở thành động lực cho hoạt động
nghiên cứu giáo dục cho giai đoạn phát triển
thông tin kỹ thuật tiếp theo / kiểm soát
thiết bị trong xe.

Research-purpose
Driving Simulator has been
delivered to Kyushu University.
Thiết bị mô phỏng lái xe
Đây
là hệ thống mô phỏng lái xe đã
được thực hiện bằng cách liên kết
thiết bị mô phỏng lái xe, thiết bị
mô phỏng dòng giao thông, thiết bị
mô phỏng xe cộ động, thiết bị mô
phỏng HILS/ECU, và hệ thống theo
dõi ánh mắt và tích hợp tất cả
chúng trong UC-win/Road. Ngày 13
tháng Năm 2012, thiết bị mô phỏng
lái xe đã được trưng bày cho công
chúng lần đầu tiên kể từ khi giao
hàng nó như là một điểm nhấn tại
"Lễ hội Đại học Kyushu" được tổ
chức trong khuôn viên Ito để kỷ
niệm 100 năm của trường đại học.
106 người, rất nhiều người trong
gia đình họ, xếp hàng để kiểm tra
lái xe trên thiết bị mô phỏng hiện
đại nhất.
Khóa kiểm tra ảo chạy 2 phút bắt
đầu từ một vị trí ở
Taihaku-doori-một đường phố chính
chạy ngang thành phố Fukuoka - gần
Văn phòng FORUM8 Fukuoka và kết
thúc ở ga Hakata. Những lái xe thử
rất vui mừng trong khóa học lái xe
của họ như nhiều người trong số họ
hoan nghênh công nghệ tiên tiến
bằng các lời nhận xét như " Tôi
thực sự ấn tượng với khả năng mô
phỏng nhiều khía cạnh của thế giới
thực với mức độ hiện thực cao. Các
hình ảnh tôi nhìn thấy trên màn
hình là rất đẹp". FORUM8 đã chuyển
giao nghiên cứu một thiết bị mô
phỏng lái xe định hướng khác (6DOF
5 Kênh) vào tháng 3, 2012 đến khoa
Kỹ Thuật, Trường Đại học Kỹ Thuật
Tokyo, Đại học Tokyo.
 |
 |
 |
 |
Lễ
khánh thành của
Human-Vehicle-Traffic
Flow Interoperable
Driving Simulation
System
for Interactive
Information Exchange
(Ngày 23 tháng Ba, 2012
/ địa điểm : Đại học
Kyushu) |
|
|
|
| Page Top
|
8DOF
Traffic Safety Simulator  |
|
Thiết bị mô phỏng lái xe tỷ lệ lớn đã được
kế hoạch và xây dựng cho Viện Nghiên Cứu
Đường Cao Tốc của Bộ Giao Thông Vận Tải
Trung Quốc (sau đây, RIOH) được sử dụng cho
hoạt động nghiên cứu giao thông và an toàn
của họ. RIOH đã phác họa những đặc điểm kỹ
thuật cùa Thiết Bị Mô Phỏng Lái Xe. Vào
tháng Giêng năm 2009, FORUM8 đã nhận được
yêu cầu phát triển Thiết Bị Mô Phỏng Lái Xe
theo yêu cầu khách hàng thông qua đấu thầu
quốc tế của riêng nó., và vào tháng Hai năm
2014, Việc kiểm tra nghiệm thu cuối cùng đã
được hoàn thành, đánh dấu việc hoàn thành
toàn bộ dự án. Sau đây là một lời giải thích
những tính năng và tổng quan về Thiết Bị Mô
Phỏng Lái xe tỷ lệ lớn công suất cao dựa
trên tương tác Sự mô phỏng Thực Tại Ảo 3D và
phần mềm mô hình UC-win/Road.
|
|
Thiết bị Mô phỏng Lái xe Độ chính
xác Cao cho Phân tích Hiệu suất
Phương tiện
|
Thiết bị mô phỏng này
là thiết bị mô phỏng lái xe 5 màn
hình lập thể 3D VR lần đầu tiên trên
thế giới mà kết hợp nhiều yếu tố như
là mô phỏng lái xe, mô phỏng giao
thông, và phương tiện động&hiệu
suất, được xây dựng dựa trên các
tương tác phần mềm 3D VR
UC-win/Road.FORUM8 đã xây dựng và
chuyển giao thiết bị này bên trong
Tổ hợp Innovation National Đại học
Nagoya (NIC) vào tháng Sáu năm 2015.
Kỷ lục mới của UC-win/Road. BBC đã
báo cáo
Thiết
bị mô phỏng Lái xe 5 Màn hình 4K
lập thể 3D VR lần đầu tiên trên
thế giới
ở Tổ hợp Innovation National
Đại học Nagoya (NIC) vào (17 tháng
2, 2016) (Youtube)
*Tính đến tháng 6 năm 2015,
không có thiết bị mô phỏng CAVE
5 màn hình đã được biết đến cũng
bao gồm một buồng lái thực tế,
do đó điều này hiện nay là một
sự thật "đầu tiên trên thế
giới".
|
|
|
| Page Top
|
Hệ
thống Tùy biến UC-win/Road
|
|
- Lily Car
- Super-jumbo DS system : 6 axis +
Yaw/X table and the entire
circumference 8 projection / cluster
composition
- UC-win/Road Bicycle simulator
- UC-win/Road Wheel simulator
- UC-win/Road Train simulator
- UC-win/Road Train signal visibility
system
- UC-win/Road Ship handling simulator
- Man-machine interface
Phát triển
hệ thống tùy biến chất lượng cao linh hoạt
bằng cách chia nhỏ mô-đun với chi phí thấp
<Dễ dàng bổ sung/ thêm các mô-đun
(hệ thống mô phỏng lái xe)>
Dưới đây là những trường hợp phát triển mà
trong đó chúng tôi đã thay đổi mô hình xe
động UC-win/Road, tùy chỉnh phần cứng của
người dùng và xuất biểu đồ điều kiện xe. Nó
tính toán sự di chuyển của xe cộ bằng cách
nhập số lượng hoạt động của bàn đạp và tay
lái từ thiết bị điều khiển trò chơi thông
thường như một kết cấu mô-đun hiện tại
(không bao gồm thêm phần biểu đồ bên phải)
Hơn nữa, nó thực hiện tính toán gia tốc của
xe và theo dõi bởi một mô-đun độc lập. Chúng
tôi bổ sung mô-đun sẵn có cho " Tính toán
gia tốc xe". Bằng cách đó, tùy biến động cơ
của mô hình xe động có thể được làm. Cũng
bởi việc bổ sung các mô-đun cho "Tính toán
theo dõi xe", chúng ta có thể phù hợp với mô
hình bề mặt đường và mô hình của lốp xe.
Bằng việc bổ sung mô-đun " thiết bị tương tự
bàn đạp vào" và mô-đun " ngắt vận hành bàn
đạp", chúng ta có thể đảm bảo cùng tồn tại
của thiết bị điều khiển trò chơi và phần
cứng khác, và chấp nhận thiết bị phần cứng
tương tự. Cuối cùng, bằng việc thêm mô-đun
cho "log acquistion and log saving", bây giờ
bạn có thể thu được và xuất thông tin liên
quan đến thiết bị mô phỏng lái xe.
Việc sử dụng chức năng nâng cấp và chức
năng tính năng mới đang được phát triển
trong VR-Studio®
<Phát triển mô-đun mới/ sử dụng trước
một chức năng của sản phẩm đang phát
triển>
Trong trường hợp chúng tôi muốn hoàn thành
một chức năng mới bởi yêu cầu khách hàng,
chúng tôi phát triển kỹ thuật cơ bản theo
cách duy nhất, và tiếp tục thiết kế và phát
triển trong một cách mà có thể cung cấp hầu
hết các chức năng mới sản phẩm đóng gói theo
yêu cầu.
Một chức năng mà chạy kịch bản có thể cải
thiện đáng kể việc mô phỏng lái xe đã được
phát triển hơn nữa bằng cách sử dụng bí
quyết xây dựng lên thông qua yêu cầu
khách hàng và nó sẽ được tải như là một chức
năng mới cho phiên bản tiếp theo.
Với chức năng kịch bản, bạn có thể đưa những
sự kiện vào trong chuyển động, gây ra phản
ứng từ lái xe, và phát triển những câu
chuyện lái xe khác nhau. Cũng như đối với
một công nghệ đồ họa máy tính mới nhất,
chúng tôi áp dụng ngôn ngữ Shader cho thế hệ
sản phẩm tiếp theo, VR-Studio, và phát triển
kết cấu quá trình của địa lý học và thể hiện
nguồn ánh sáng tiên tiến. Để thực tế chúng
cần được tùy biến, có rất nhiều thứ được
phát triển từ công nghệ cơ bản đến công nghệ
độc nhất. Mô hình tỷ lệ lớn đã phát triển
trong VR-Studio và phát triển tùy biến dùng
chức năng LOD trước là sẵn có.
Việc thực hiện mô phỏng tiên tiến
bằng việc kết hợp với phần cứng.
<UC-win/Road Drive Simulator / Motion
Platform>
Có thể tùy chỉnh thiết bị mô phỏng lái xe
UC-win/Road (DS) là một điển hình của việc
kết hợp với phần cứng."Nền tảng chuyển động"
có tối đa chuyển động 6 bậc tự do, Ném,Lăn,
Lắc ngang, Lắc lư, Dao động, Nâng lên, phục
vụ như một hệ thống rất thực tế cung cấp số
lượng cảm giác tối đa của việc lái xe.
Những thành tựu phát triển của thời kỳ DS
bao gồm DS cho nghiên cứu ô tô, phát triển
hệ thống an toàn, thiết bị mô phỏng đào tạo,
thiết bị mô phỏng cho xuất bản, và thiết bị
mô phỏng tầu hỏa. Trong việc kết hợp với
phần cứng, nó có thể bao gồm nhu cầu mô
phỏng khác nhau bởi vì nó không chỉ sử dụng
những tính năng của môi trường thời gian
thực 3D VR cái mà quan trọng trong việc kết
hợp với phần mềm mà còn là hệ thống có thể
thực hiện linh hoạt bản vẽ của không gian
3D, sự bổ sung và kiểm soát kịch bản sự
kiện. |
|
| Page Top
|
 |
●MR :
Mixed Reality ●AR :
Augmented Reality
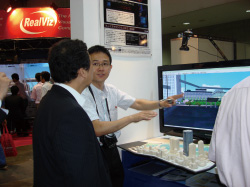
Mô hình thành
phố Osaka và hệ thống liên kết
VR
Sự phát
triển của Phương Pháp Trình Diễn
Thành Phố bằng việc liên kết
Điểm nhìn giữa Mô Hình Vật Lý và
VR
|
|
 |
Phó
Giáo Sư Tomohiro Fukuda
(Tốt nghiệp Trường Kỹ Thuật, Đại
học Osaka, Nhật Bản) |
|
| Ông Fukuda đã phát triển một cơ
chế liên kết mô hình vật lý tỷ lệ
1/300 của Nakanoshima với mô hình
VR, Osaka, chỉ các mô hình vật lý
với một con trỏ lade, có một cảm
biến để đọc nó và hiển thị trong VR.
Anh ấy đã hướng dẫn lợi ích của hệ
thống kết nối mô hình vật lý và VR
trong khi đang giải thích nguyên
mẫu. |
|
Mô
hình điện toán đám mây Shibuya
và thiết bị tương tác
Phát triển
Hệ Thống Liên Kết cho VR và
Thiết Bị Tương Tác
|
|
 |
Ông
Taro Narahara
(Tốt nghiệp Đại học Harvard, Mỹ)
|
|
Ông Narahara đã đề cập đến một dự
án, trong đó ông đã hướng dẫn bắt
những hành động từ người thật thành
chuyển động của nhân vật, và đại
diện số liệu thực tế hơn trên
UC-win/Road.
Ngoài ra, ông đã giải thích cơ chế
kích hoạt tương tác thời gian thực
bằng cách liên kết các mô phỏng và
UC-win/Road trong thời gian thực
thông qua sự phát triển chung của
chương trình nhúng với FORUM8 |
|
| Face Mount System |
Với kết nối các cảm biến và gương
lồi đến UC-win/Road, không gian VR
có thể được hiển thị trong màn hình
goggle bằng cách tính toán chuyển
động đầu chính xác dựa trên nhiều
tín hiệu từ mỗi cảm biến.
Thiết bị mô phỏng VR thực tế hơn có
thể được xây dựng so với các màn
hình bình thường bằng cách kết nối
đến hệ thống thiết bị mô phỏng lái
xe và hệ thống triển lãm.
| Cảm
biến |
Gương
lồi
|
Sản
phẩm POLHEMUS
Các vị trí được tính toán
bởi đạt được 6 trục thông
tin với PATRIOT ( 6 trục
thông tin) máy phát từ
trường cảm biến và bộ điều
khiển. |
VUZIX
products iWear VR920 |
|
|
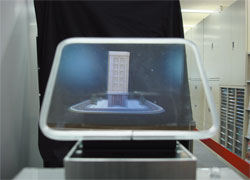
Hệ Thống Lập Thể 3 Chiều
Hệ
Thống Lập Thể 3 Chiều Mắt Thường
|
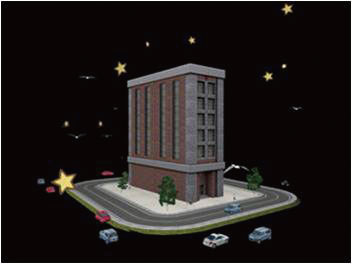
Một
ví dụ của cấu hình hệ thống
Kính hình ảnh 3 chiều. Thành phần của
một chiều và hình ảnh 3 chiều được hiển thị
3D-B-Vision là gì?
3D-B-Vision là một Thực Tế Hỗn Hợp, hay cụ
thể hơn, một hệ thống phần cứng Tăng Thêm
Hiện Thực (AR). AR đang trở thành phổ biến
hơn bởi vì chức năng chiếu thông tin kỹ
thuật số qua thế giới thực (vật lý). Và với
3D-B-Vision, có thêm lợi ích của việc chiếu
thông tin kỹ thuật số trong mẫu của
3D-Stereoscopic CGI. Thông tin có thể được
hiển thị thông qua mô hình kiến trúc hay
những đối tượng vật lý khác. Hệ thống kính
được hoàn thành bởi sử dụng 2 máy chiếu nhỏ,
đặt khoảng cách mắt riêng biệt (cho khả năng
lập thể 3D). Người tham gia nhìn thông qua
một cửa sổ nhìn trong suốt hướng vế đối
tượng vật lý, và với màn hình bạc trên cao
và kính lọc, hình ảnh lập thể 3D có thể được
nhìn cùng với thiết lập vật lý. Với
UC-win/Road phiên bản 4, thông tin mô phỏng
thời gian thực có thể được chiếu.
UC-win/Road 4 sẽ bao gồm một chương trình
nhúng 3D Stereo có thể tận dụng đầy đủ các
tính năng của 3D-B-Vision. Ô tô, người đi
bộ, và sự di chuyển những phần tử khác có
thể được thể hiện hoạt động cùng nhau cho
một sự trình bày hiệu quả với sự chiếu lập
thể 3 chiều 3D-B-Vision.
Lợi ích
- Với UC-win/Road, mô phỏng thông tin thời
gian thực có thể được sử dụng 3D Stereo
không cần kính phân cực p
- Xúc tiến những thảo luận mới cho dự án
- Phụ thuộc vào kích thước mô hình vật lý,
nhiều có thể được sử dụng như là "kiosks"
với nhiều thông tin khác nhau tác động lên
thị giác mạnh mẽ với dữ liệu di chuyển.
Được phát triển bởi: Ishikawa Kougaku Zoukei
Laboratory Co.,Ltd. (http://www.holoart.co.jp/)
 |
 |
|
Hiển thị thông
thường thông qua lập thể 3D |
|
|
| Page Top
|

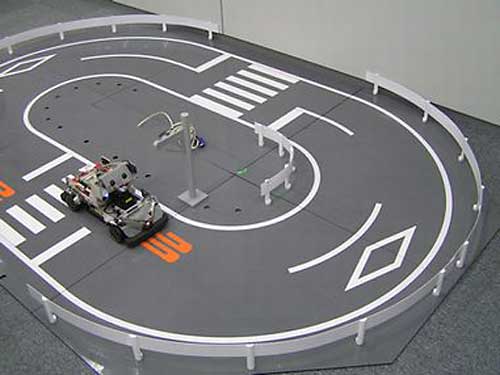
Tích
hợp nền tảng xe robot và thực tế ảo
|
|
UC-win/Road cho phép tạo ra môi trường
Thực Tế Ảo (VR) tỷ lệ lớn dễ hiểu thủ tục và
hoạt động. Thông qua công nghệ này, FORUM8
có thể cung cấp một loạt các mô phỏng thời
gian thực cho một loạt khách hàng. Công việc
của chúng tôi với RoboCar® cho phép chúng
tôi đi xa hơn VR và cung cấp sự mô phỏng
Thực Tế Hỗn Hợp (MR)
 RoboCar® RoboCar®
Với sự tiến bộ trong công nghệ Ô tô và công
nghệ Robot, thế hệ xe thông minh tiếp theo
sẽ chia sẻ một loạt các công nghệ robot di
động độc lập. Công nghệ robot có thể được
ứng dụng cho nền tảng mô hình tỷ lệ 1/10 cho
những nghiên cứu ban đầu về tính di động độc
lập, thông tin liên lạc nội bộ xe, tương tác
con người - xe và nhiều hơn nữa. Ngoài ra,
chúng tôi sẽ cung cấp hệ thống này đến
trường đại học, doanh nghiệp và những tổ
chức khác như là công cụ giáo dục kỹ thuật
để thu hẹp khoảng cách giữa các ngành công
nghiệp và các viện nghiên cứu, để được sử
dụng nghiên cứu về lý thuyết điều khiển và
điều khiển tự động, và phát triển quá trình
giáo dục.
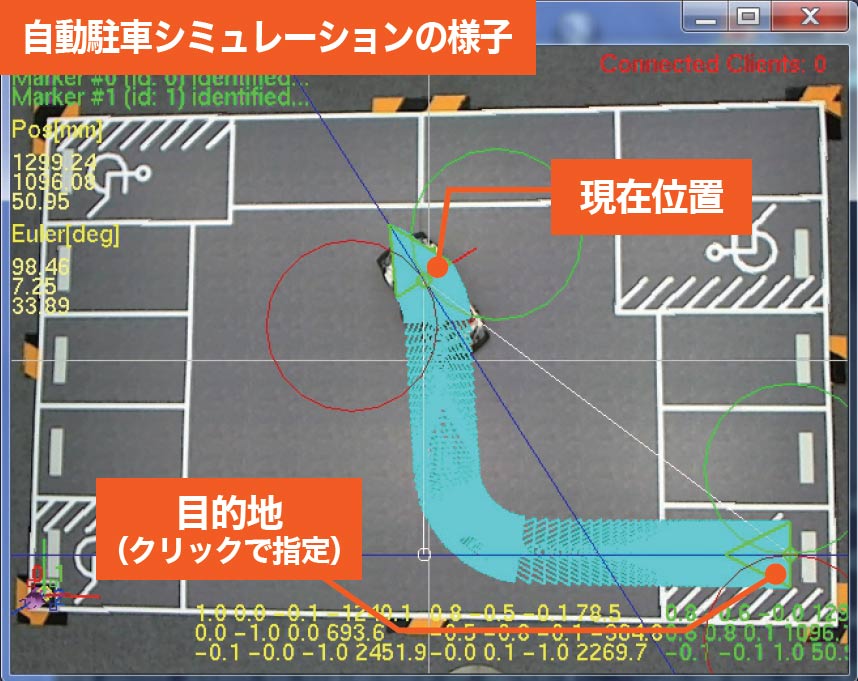
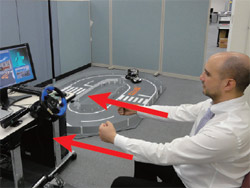
Sự kết hợp của UC-win/Road và
RoboCar®
Trong UC-win/Road, đại diện cụ thể của không
gian 3D với một loạt các mô phỏng và tình
huống giao thông có thể được đạt được, và
người dùng có thể lái xe tự do trong không
gian 3D, và RoboCar® là một mô hình tỷ lệ
1/10 của xe ô tô thật có thể được lái xung
quanh mô hình vật lý thật. Với sự kết hợp
của 2 sản phẩm này, sự mô phỏng trong nhiều
thực tại có thể kiểm tra được cái mà không
thể thực hiện được trong môi trường thực tại
ảo.
 |
 |
 Tạo mô hình của môi
trường lái xe (phải), và mô phỏng
lái xe trong 3D VR (trái) Tạo mô hình của môi
trường lái xe (phải), và mô phỏng
lái xe trong 3D VR (trái) |
|
|
| Page Top
|

Giải Pháp Đỗ Xe FORUM8
|
|
FORUM8 cung cấp một giải pháp toàn diện
đến nhiều vùng của thiết kế bãi đỗ xe và
trực quan như hệ thống đồng bộ tự động đỗ xe
với RoboCar®, tìm kiếm các khu vực đỗ xe
trống và một hệ thống dẫn hướng sử dụng
VR-Cloud® vv. Ngoài ra người dùng có thể tạo
ra mô hình đỗ xe sử dụng thông tin bản vẽ và
sự mô phỏng 3D VR bằng cách kết nối " Tạo
bản đồ quỹ đạo xe/ Bản vẽ bãi đỗ xe và thiết
kế CAD" đến UC-win/Road. |
|
 |
|
| Page Top
|
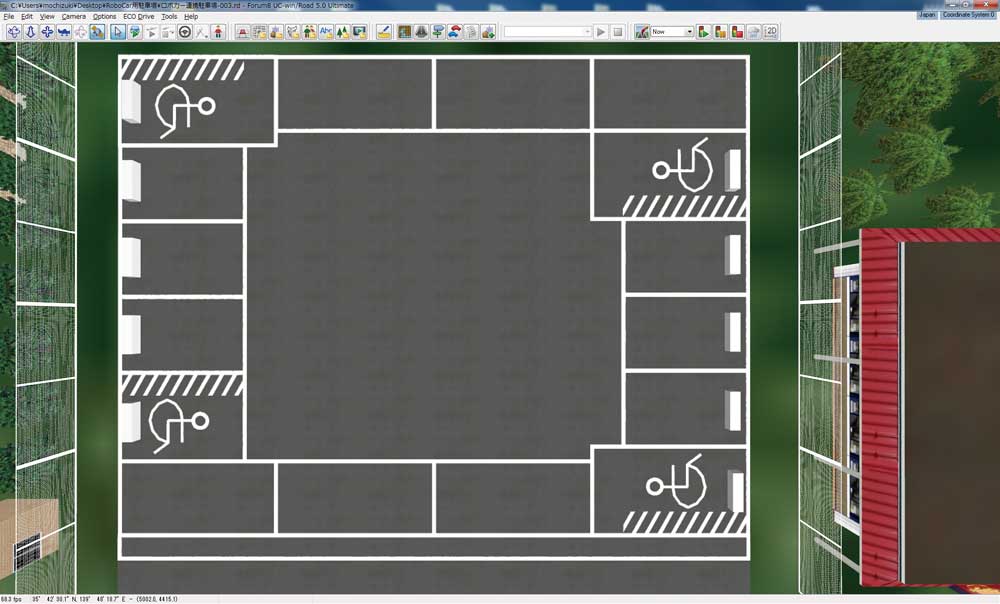
Quỹ
đạo xe/ Hệ thống đỗ xe tự động lô đỗ xe CAD
|
|
Vẽ quỹ đạo xe/ Thiết kế bãi đỗ xe/
Hệ thống đỗ xe tự động
Sự mô phỏng được thực hiện bằng cách sử dụng
thông tin bản vẽ và liên kết tạo ra các bản
đồ quỹ đạo và việc tạo và thiết kế lô đỗ xe
với UC-win/Road. Ngoài ra, một hệ thống đỗ
xe tự động có sẵn thông qua sự đồng bộ của
mô hình VR và RoboCar® |
|
- Hệ
thống vẽ quỹ đao xe.
Điều này cho phép người sử dụng
tính toán và vẽ đường đi của xe dựa trên
các lý thuyết tượng trưng của " Bản vẽ
quỹ đạo góc chuyển phải của xe bán móc
hậu và xe móc hậu (JASO Z006-92), Hiệp
hội kỹ sư ô tô Nhật Bản". vv.Mô phỏng
lái xe trên các tuyến đường hình dung và
tuyến đường hiện có và bản vẽ quỹ đạo xe
có thể được tiến hành hiệu quả
- Hệ
thống bản vẽ bãi đỗ xe
Đây là một hệ thống CAD, thiết kế bãi đỗ
xe dựa trên các tiêu chuẩn bãi đỗ xe với
lý thuyết " Quy trình tiêu chuẩn bãi đỗ
xe",
"Tiêu chuẩn thiết kế đường" vv. (Bản vẽ
mặt bằng).
Nó cho phép người sử dụng xuất bản vẽ
xây dựng bãi đỗ xe đến dữ liệu CAD, dữ
liệu này có thể được sử dụng trong " Hệ
thống bản đồ quỹ đạo xe" của chúng tôi.
- UC-win/Road
RoboCar® Auto parking plugin
Hệ thống này cho phép vận hành tự động
bánh lái khi đỗ xe dựa trên thông tin từ
máy quay phim hay cảm biến siêu âm bởi
mối liên kết giữa UC-win/Road và
RoboCar(R). Việc đỗ xe có thể được thực
hiện tự động bởi trình điều khiển đơn
giản chỉ cần nhấn vào nút bên ngoài xe.
|
|
| Page Top
|

Parking Solution
VR-Cloud® Parking NAVI |
|
E-Parking cho phép đặt vị trí đỗ xe thông
qua thiết bị đầu cuối kết nối mạng như mà
Điện thoại thông minh vv.Bởi vậy E-Parking
giải quyết vấn đề tìm kiếm vị trí đỗ xe
trong khu đô thị sầm uất, đạt được nhiều lợi
ích từ việc tăng hiệu quả vận hành Bãi Đỗ
Xe. Tuyến định vị sẽ được xây dựng bởi
VR-Cloud® cho việc duy trì khu vực đỗ xe. Nó
không cần phải chuẩn bị thông tin riêng rẽ
bởi vì mô hình VR bao gồm bãi đỗ xe đã được
tạo. Hơn nữa, hiển thị 2D và hiển thị thông
tin văn bản cũng có thể nếu được yêu cầu.
*1…Chỉ các thiết bị đầu cuối ứng dụng công
nghệ GPS
|
|
| Page Top
|
Lĩnh
vực phát triển công nghệ Robot của
FORUM8
Sự
Mô Phỏng Điệu Bộ Lái Xe
|
 |
AirDriving
& UC-win/Road (posted on
'12.02.13) |
|
AirDriving
& RoboCar
(posted on '12.01.06) |
|
Tokyo Game Show
6K Signage Real-time VR UC-win
Road Air Driving
(posted on '11.09.29) |
|
Mind&VR
UC-win/Road cho MindSet
Sự liên kết của Mindset Unit đo hoạt
động của não với VR
Nghiên cứu
trên Điều Khiển Cầm Tay
|
Thiết bị đầu tiên chúng tôi sử
dụng để tích hợp điều khiển cầm tay
là MindSet từ NeuroSky. Cơ bản nó là
một tai nghe Bluetooth với khả năng
đo hoạt động của não (EEG). Nó có
hai tai nghe và một micro. Ba điện
cực trên tai nghe trái và một điện
cực trên trán người sử dụng cho phép
thiết bị này ghe lại tín hiệu EEG
hoạt động não của người sử dụng.
Từ việc phân tích các tín hiệu EEG,
các thành phần tín h
iệu có thể được trích xuất (Sóng
Alpha, sóng Beta, sóng Gamma, sóng
Delta, sóng Theta), cũng như hai
thông số, chỉ số suy nghĩ và chỉ số
tập trung. Mỗi nhân tố đặc trưng cho
trạng thái người sử dụng. Các chỉ số
trung gian tăng lên khi người sử
dụng thư giãn trong khi các chỉ số
tập trung tăng lên khi người sử dụng
tập trung tâm trí của mình vào một ý
nghĩ cụ thể.
 |
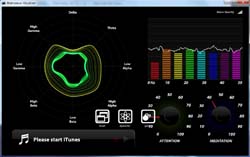 |
MindSet Unit
(Neurosky) |
"Brainwave
Vizualizer" (Neurosky) |
|
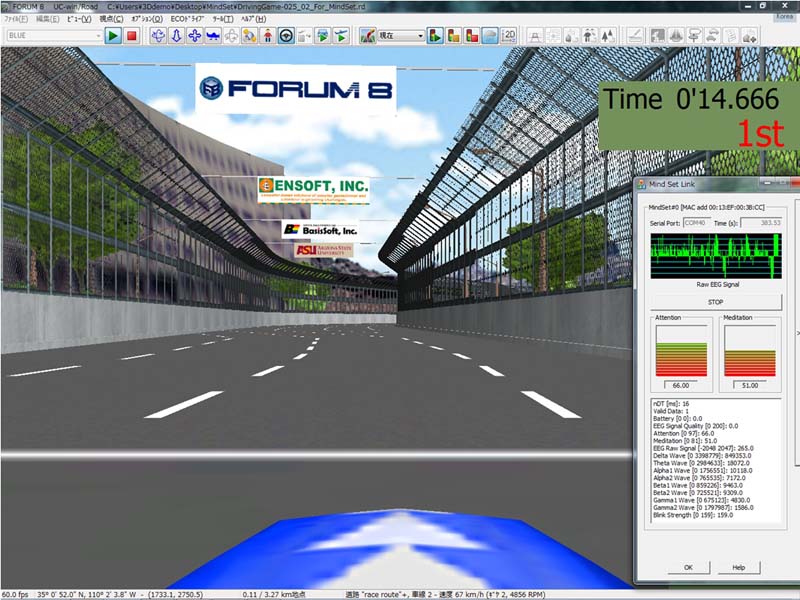
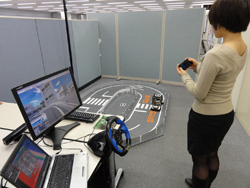
Ứng dụng : Cuộc đua ô tô F1
|
Ứng dụng đầu tiên của chúng tôi sử
dụng công nghệ dựa trên EEG là một
cuộc đua ô tô công thức 1. Với mục
đích này chúng tôi đã phát triển một
giao diện cho phép đọc hai đơn vị
MindSer, trong thời gian thực
(@60Hz), với khai thác chỉ số tập
trung và chỉ số suy nghĩ.
Cuộc đua ô tô F1 diễn tra trên đường
phố Phoenix ở Arizona, US.Giao diện
này được thực hiện như một máy chủ
vì vậy hai người có thể đua trên
những máy riêng biệt.
Sự tăng tốc của xe được điều khiển
bởi thông số tập trung, nhiều người
sử dụng có thể tập trung suy nghĩa
của mình, chiếc xe di chuyển nhanh
hơn. FORUM8 đề xuất hệ thống nghiên
cứu sử dụng thông tin sinh học của
sóng não.
 |
 |
| Phoenix
F1 Circuit |
Phổ
biến hệ thống triển lãm
cho thiết bị trò chơi. |
|
|
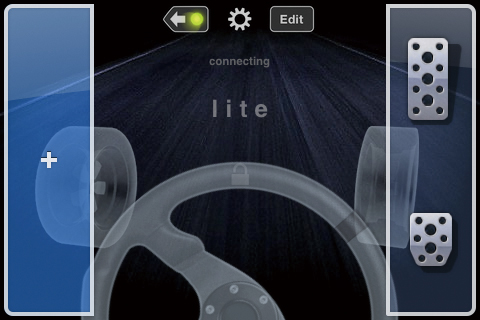
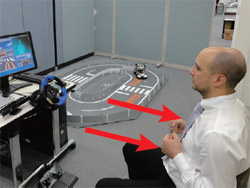
Thiết
Bị Mô Phỏng Lái Xe Kinect (TM)
Sự mô phỏng lái xe với cảm
biến tương tác
Hệ thống cho phép vận hành UC-win/Road bằng
việc di chuyển cánh tay như hoạt động của
bánh lái phía trước của Kinect (TM)
Vị trí của cả hai tay được phát triển bằng
Knict (TM) được chuyển đổi vào hệ thống tay
lái, gia tốc, phanh của xe.
Kiểm soát xe và
hình ảnh của hoạt động lái xe với cảm
biến hồng ngoại.
Bằng việc tương
tác với UC-win/Road, hệ thống này cho phép
vận hành trong không gian VR bằng việc di
chuyển nắm tay cầm ảo trước Kinect (TM). Vị
trí của cả hai tay được phát hiện bởi
Kinect(TM) được chuyển đổi vào trong hệ
thống tay lái, tăng tốc, phanh của xe.
 |
|
 |
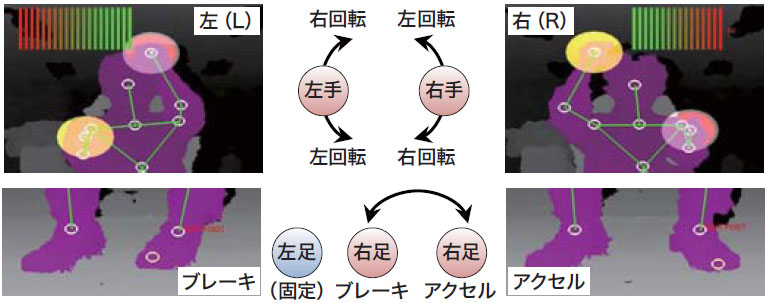
| Hệ
thống tay lái (Rẽ trái, Rẽ Phải) |
 |
|
 |
| Hệ thống gia tốc |
|
Hệ thống phanh |
|
|
| Page Top
|
Hệ
Thống Tín Hiệu Kỹ Thuật Số Multi-Cluster với cảm
biến hồng ngoại sâu.
Hệ
Thống Tín Hiệu Kỹ Thuật Số Multi Cluster 6K
|
|
Hệ thống tín hiệu kỹ thuật số
Muilti-Cluster với cảm biến hồng ngoại sâu
Hệ thống tín hiệu kỹ thuật số tương tác sử
dụng một màn hình hiển thị 6K trên đa màn
hình cùng với các cảm biển hồng ngoại sâu.
 |
 |
Tín hiệu cụ thể 6K
AirDriving
(Tokyo Game Show2011) |
Giao diện AirDriving |
 |
|
 |
| 6 màn hình mạng tín
hiệu |
|
Tổng quan của hệ
thống tín hiệu kỹ thuật số Đa-Mạng
với cảm biến hồng ngoại sâu. |
Tập tin phim độ nét cao được tạo ra
bởi công nghệ POV-Ray là một tính
năng " Dịch vụ phim CG trên nền điện
toán đám mây hiệu năng cao" của
FORUM8. Tập tin phim độ nét cao có
thể được cung cấp bởi sử dụng siêu
máy tính. Kể từ khi tập tin phim
được tạo ra bởi công nghệ POV-Ray,
những tập tin kịch bản có thể được
chỉnh sửa bởi một trình soạn thảo
vv. sau đó tập tin được xuất đến
UC-win/Road. |
|
|
| Page Top
|
Lĩnh
vực phát triển công nghệ Robot của FORUM8
Công nghệ mới nhất giải pháp
sử dụng robot
|
|
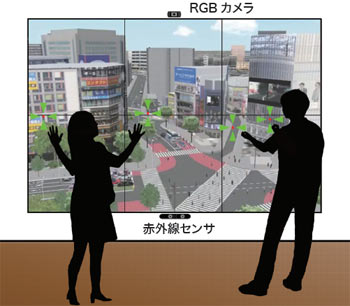
Ứng
dụng UC-win/Road Air Driving
Nó cho phép
vận hành lái xe chi tiết cao mà không cần
bất kỳ thiết bị điều khiển nào
|
| Mô phỏng lái xe
thông qua tín hiệu mạng với 6 màn
hình |
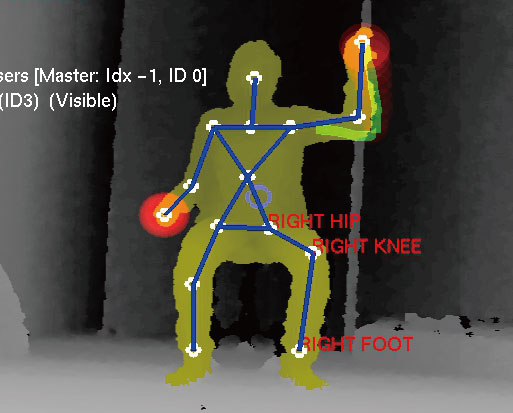
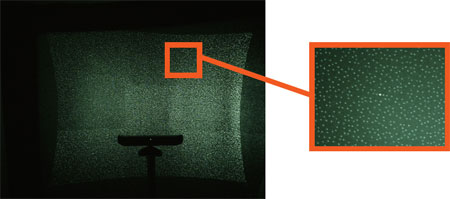
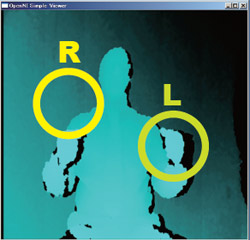
Sự nhận dạng khung xương
Hệ thống có thể nhận dạng người dùng từ việc
phát hiện thông tin khoảng cách bởi bộ cảm
biến hồng ngoại sâu và có thể phân biệt các
tính năng của con người. Hơn nữa, xác định
cỡ và cấu trúc xương được nhận dạng
 |
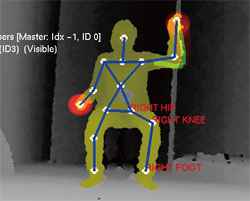 |
Định vị vị trí
(trái) và kết quả của nó (phải)
|
Cảm
biến Kinect (TM)
|
XtionPRO |
 |
 |
|
Cảm
biến hồng ngoại sâu (Kinect(TM)、XtionPRO)
Cảm biến hồng ngoại sâuKinect(TM)
Chương
trình nhúng đỗ xe tự động UC-win/Road
RoboCar®
Hệ thống này
cho phép vận hành tự động tay lái trong khi
đỗ xe dựa trên cơ xở thông tin từ máy quay
hay bộ cảm biến siêu âm kết nối giữa
UC-win/Road và Roborcar®. Việc đỗ xe có thể
được thực hiện tự động bởi nút bấm đơn giản
bên ngoài xe.
- Đồng bộ với mô hình của UC-win/Road ngữ
cảnh của việc đỗ xe tự động có thể được kiểm
tra trong VR
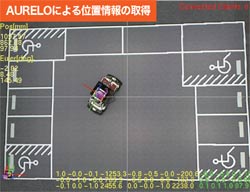
- Đường dẫn tìm kiếm và quyết định
bởi:Artificial Intelligence
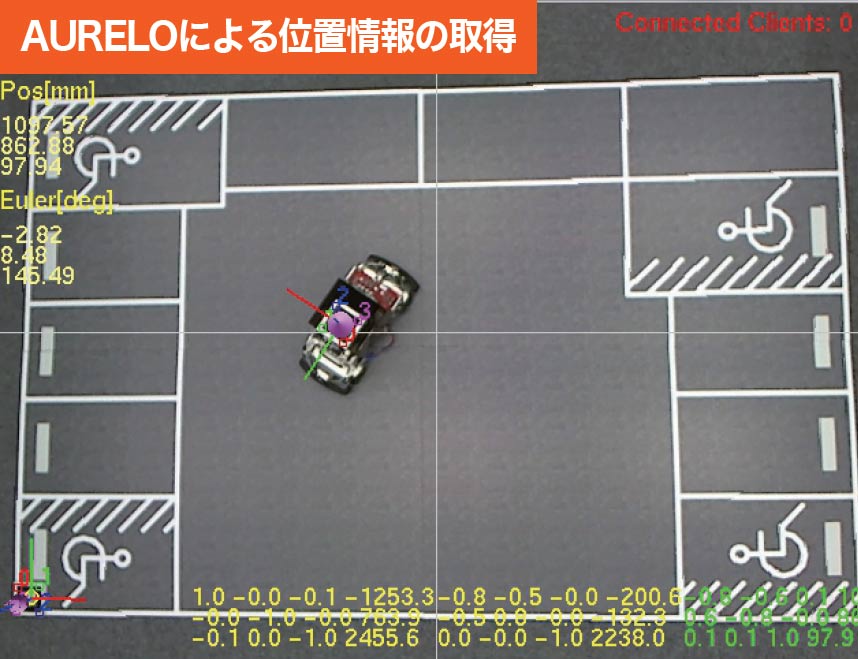
- Vị trí và hướng của RoboCar® được dựa trên
AURELO (Augmented reality localization
system) và điểm đối tượng đỗ xe dựa trên bản
đồ khu đỗ xe cái mà có một hệ thống đỗ xe tự
động
 |
 |
 |
| RoboCar® mô phỏng tự
động đỗ xe thông qua AURELO |
 |
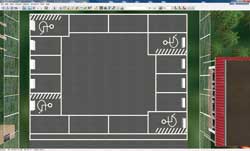 |
| Ngữ cảnh đỗ xe tự
động được kiểm tra trên
UC-win/Road |
Ngữ cảnh đỗ xe có thể
được kiểm tra ở bất kỳ vị trí nào. |
AGUL AR.Drone
Công nghệ
chiếu quản lý đất nông nghiệp từ xa sử
dụng hệ thống tùy biến AR.Drone
AGUL là một hệ thống được phát triển bởi
cách tùy biến AR. Drone (Parrot) với mục
đích hỗ trợ nông nghiệp. AGUL xác nhận tình
hình tăng trưởng của mùa vụ và sâu bọ và hỗ
trợ quản lý đất nông nghiệp bởi tập hợp
thông tin từ bầu trời với một máy quay, cảm
biến nhiệt độ và cảm biến độ ẩm. Kể từ khi
hình ảnh xung quanh có thể được truyền từ
máy quay gắn trong thời gian thực. AGUL có
thể tránh được các chướng ngại và có thể
được vận hành từ những nơi xa xôi như ở nhà.
- Giao tiếp thông qua WiFi
- Gắn liền máy tính kiểm soát sự cân bằng tự
động
- Xác nhận với một máy quay phía trước và
máy quay tốc độ cao và ghi lại các chi tiết
với máy quay FLY-DV
- Đo đặc GPS trong AR.Drone
- 9DOF IMU xác nhận hướng bay của AR.Drone
bằng việc đo tỷ lệ gia tốc, con quay hồi
chuyển và từ tính của trái đất
- Cảm biến khoảng cách của tia hồng ngoài
tránh va chạm với chướng ngại vật bằng cách
đo khoảng cách đến phía trước
 |
 |
 |
|
Sự tùy biến AGUL
customization |
Kiểm tra bay của AGUL |
|
|
| Page Top
|

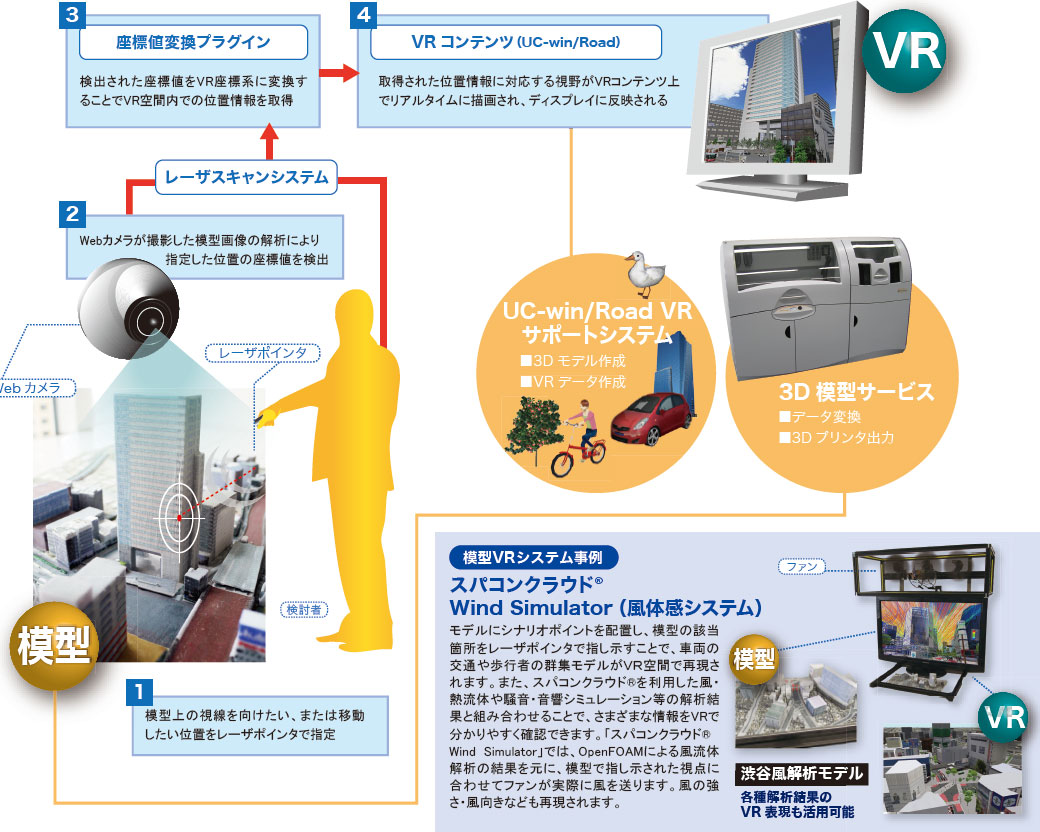
Hệ thống trình bày/ mô phỏng
kết hợp với mô hình vật lý và VR
|
|
" Mô hình vật lý
UC-win/Road và hệ thống VR" đã được phát
triển trên dựa trên cơ sở ý tưởng và sự hợp
tác của Phó Giáo Sư Tomhiro Fukuda của Đại
học Osaka, thành viên của W16. Cảm ơn đến
công nghệ cung cấp một sự vận hành kết hợp
giữa môi trường mô hình vật lý và hệ thống
VR, nó là một loại công cụ mới trình bày/ mô
phỏng kết hợp tính năng của cả hai môi
trường. Hệ thống cho phép bạn trình bày
thông tin hiệu quả và hiệu quả đến những
người khác liên quan với nền hiểu biết khác
nhau và nhiều mức độ hiểu biết khác nhau.
UC-win/Road
Physical Model and VR System
(Up&Coming '11 Early Spring Issue)
Hỗ trợ kỹ thuật
: Phó Giáo Sư Tomohiro Fukuda,
Trường Kỹ Thuật, Đại học Osaka |
Công cụ ví dụ sự thuận lợi của cả
hai mô hình vật lý và mô hình VR
Lợi ích của VR : VR rất linh hoạt và
ý nghĩa, và cho phép xem xét nhiều vấn đề
như là sự phát sinh dòng phương tiện giao
thông hay thay đổi điều kiện thời tiết, điều
đó là không thể thông qua mô hình phân tích
vật lý
Lợi ích của mô hình vật lý: Mô hình
vật lý là cách trực quan hơn để hiểu được
tổng thể quy hoạch bao gồm khoảng cách và
kích cỡ. Mô hình vật lý cho phép nhiều người
khác nhau kiểm tra từ các góc độ khác nhau
trong cùng thời gian, hiểu mô hình toàn
thành phố và chạm trực tiếp đến mô hình.
Quyết định quan điểm xem xét trong
mô hình vật lý và hiển thị nó trong mô
hình VR
Việc lập kế hoạch có thể được nghiên cứu dễ
dàng và vận hành trực quan so với chỉ có VR.
Trong " mô hình vật lý UC-win/Road và hệ
thống VR", bạn có thể di chuyển trong không
gian VR và thực hiện thay đổi hướng nhìn
bằng việc chỉ ra các điểm nhìn để kiểm tra
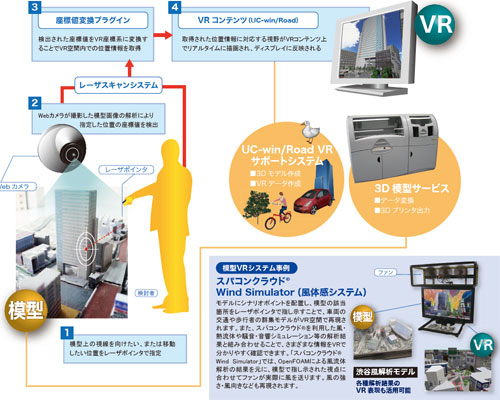
với con trỏ laser trên mô hình. Hệ thống bao
gồm mô hình, web camera, con trỏ laser, phần
mềm VR "UC-win/Road", và hiển thị đơn vị để
xem không gian VR. Nhìn chung hệ thống bao
gồm 2 chức năng: phát hiện hoạt động con trỏ
laser, chuyển thông tin đến UC-win/Road và
trình bày nó trong không gian VR.
Hệ thống mô hình vật lý VR
"Bản đồ An toàn và An ninh
Nakameguro" đã
triển lãm ở phòng trưn bày
Hệ thống mô hình vật lý VR của " Bản đồ An
toàn và An ninh Nakameguro" đã được triển
lãm tại văn phòng trưng bày của trụ sở chính
FORUM8 Tokyo. Hãy đến và thăm chúng tôi.
Đề xuất và báo giá hệ thống
FORUM8 sẽ cung cấp đề xuất và báo giá của "
Hệ thống hỗ trợ UC-win/Road" dựa trên yêu
cầu của mỗi khách hàng.Với hệ thống hỗ trợ
UC-win/Road, dữ liệu mô phỏng 3D VR có thể
được tạo dựa trên những gì khách hàng cần.
Dữ liệu VR đã tạo có thể được ra mô hình
bằng việc xuất dữ liệu VR đến mô hình vật lý
sử dụng máy in 3D trong thời gian ngắn với "
Dịch vụ mô hình vật lý 3D" vì vậy hệ thống
làm mô hình có thể mô hình kết cấu hiệu quả.
Kể từ khi dữ liệu được tạo có thể sản xuất
mô hình vật lý 3D bởi " Dịch vụ mô hình 3D",
khách hàng có thể tạo mô hình Vật lý và hệ
thống VR hiệu quả
Ví
dụ báo giá: "Bản đồ An toàn và
Bảo mật Nakameguro" hệ thống VR
mô hình vật lý
|
The proposal
system with the physical model in
Nakameguro where FORUM8 is located.
The maintenance condition of
infrastructure in the basement and
the inside space of building can be
checked as "Area safety and security
map" where the physical model and VR
are integrated, and it can be used
for the consensus formation in the
city re-development project.
Hệ thống đề xuất với mô hình vật lý
ở Nakameguro ở đó FORUM8 đặt trụ sở.
Các điều kiện bảo dưỡng cở sở hạ
tầng trong tầng hầm và không gian
bên trong tòa nhà có thể được kiểm
tra như " Bản đồ khu vực an toàn và
bảo mật" ở đó mô hình vật lý và VR
được tương tác, và nó có thể được sử
dụng cho việc hình thành sự đồng
thuận trong thành phổ của dự án tái
phát triển.
Việc tạo dữ liệu VR : Khoảng
2,700,000 Yen
Việc tạo mô hình vật lý 3D : Khoảng 3,600,000
Yen
* Bao gồm chi phí đăng ký ARToolKit,
Web camera, laser pointer, máy tính,
màn hình 42inch, phần mềm
UC-win/Road Ver.5 Advanced x1
license, chi phí tùy biến
UC-win/Road, và phí kỹ thuật.
Tất cả 11,600,000 Yen
 |
 |
 |
"Bản đồ an
toàn và an ninh
Nakameguro"
Mô hình VR tổng quan |
Khu vực phía
trước của nhà ga
Nakameguro |
Meguro Ginza
Shopping Avenue |
 |
Hợp tác kỹ
thuật: Phó Giáo Sư
Tomohiro Fukuda
kỹ thuật năng lượng môi
trường của Đại học Osaka |
|
|
|
| Page Top
|
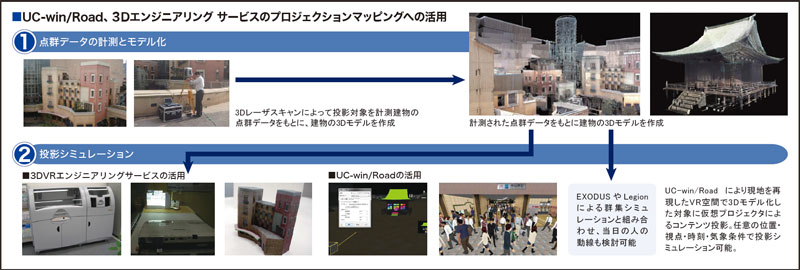
3D
Projection Mapping
Thực hành chiếu một hình ảnh trên kết cấu
vật lý sử dụng công nghệ 3DVR và nội dung
|
|
FORUM8 cung cấp công nghệ trực quan tiên
tiến sử dụng hình ảnh và dữ liệu 3DVR, tên
là "3D Projection Mapping"
Tổng
quan về dịch vụ Projection
Mapping 3D
|
Projection Mapping là một kỹ thuật biển diễn
hình ảnh tiên tiến trong đó hình ảnh VR được
chiếu trên một kết cấu vật lý (kết cấu 3D)
như là tòa nhà, ô tô, và đồ đạc sử dụng máy
chiếu. Projection Mapping rất phổ biến được
sử dụng ở Châu Âu như chiếu đèn thu hút
khách du lịch đến khu nghỉ mát. Công nghệ có
nhiều ứng dụng từ bản vẽ nhiều người đến sự
kiện và cửa hàng, để đưa sức sống mới đến
các địa phương
Giải pháp chiếu sử
dụng VR

* Lịch trình có thể thay đổi tùy
thuộc vào các đặc điểm kỹ thuật |
Giải
pháp chiếu sử dụng VR
|
Bằng việc chạy mô phỏng chiếu thông qua
UC-win/Road và dịch vụ kỹ thuật 3D, hình ảnh
có thể được xác nhận bởi xem xét ở mô hình
VR hay xuất mô hình đến mô hình thực tế thu
nhỏ trước khi thực hiện ở mô hình thật. Giải
pháp này là một công cụ lý tưởng thẩm địn
nội dung, thảo luận với các bên liên quan,
giải thích và quảng cáo đến khách hàng, và
kế hoạch quảng cáo trước sau đó sự kiện
chiếu diễn ra.
Một
ví dụ của kế hoạch chiếu mô hình
|
Một ví dụ của kế hoạch
- Vị trí : Một nơi tương đối tối ngoài
trời dễ dàng để đặt và làm chiếu bản đồ
mà không ảnh hưởng đến giao thông
- Kết cấu mục tiêu : Một tòa nhà hình
tháp với hình học đơn giản
- Kích cỡ tòa nhà : W10m x D6m x H20m
- Vật liệu tòa nhà : Gạch (nâu / mờ)
- Số lượng vị trí từ đó hình ảnh được
chiếu : nhiều nhất 2
- Khoảng cách chiều: approx. 15m (A:gần)
approx. 40m (B:xa)
Kế hoạch chiếu hình ảnh của 10,000/
20,000 lumen thông qua máy chiếu
10,000lumen có ít độ sáng và diện tích so
với 20,000 lumen. 20,000 lumen luôn luôn
được khuyến cáo
 |
| Sử dụng 2 máy chiếu |
Danh mục kế hoạch mô hình chiếu (nội dung
2D, 3D)
*Chi phí hiệu ứng âm thanh: Chi phí thiết bị
tạo hiệu ứng âm thanh và nội dung hiệu ứng
âm thanh, tổng cộng khoảng US$10,000.
*Bao gồm nội dung hoạt họa 3D và hiệu ứng âm
thanh.
| Thiết
bị |
1
máy chiếu |
2
máy chiếu |
| Máy
chiếu chiếu 10,000 hình ảnh lumen |
US$
65,000 |
US$
100,000 |
| Máy
chiếu chiếu 20,000 hình ảnh lumen |
US$
75,000 |
US$
90,000 |
- Công việc xấp xỉ 3 phút và bao gồm
hiệu ứng hình ảnh và âm thanh (sử dụng
định dạng, MA)
- Thời gian thuê thiết bị tạo hình ảnh
và hiệu ứng âm thanh: 3 ngày (1 ngày
chuẩn bị , 2 ngày sự kiện)
- Bao gồm kiểm tra ngoài hiện trường và
quản lý tiến độ
- Điều hành và kỹ sư hiệu ứng hình ảnh/
âm thanh sẵn có
- Transport / travel / accommodation fee
required for areas other than the Kanto
region (Tokyo and the surrounding
prefectures) Chi phí giao thông / đi lại
/ phòng ở được yêu cầu cho những vùng
khác từ vùng Kanto (Tokyo và vùng lân
cận)
- Chi phí đứng và thuê cần cẩu không bao
gồm
|
|
| Page Top
|
IM
& VR
Giải pháp tích hợp thông qua BIM/CIM & VR
|
|
Allplan, là mộ giải pháp tích hợp BIM được
phát triển bởi nhà sản xuất phần mềm CAD Đức
Nemetscheck. Nó có khả năng thiết kế và
trình bày nhiều thông tin khác nhau trong
vòng đời dự án của công trình xây dựng cơ
bản và bản vẽ chi tiết, tái tạo hình ảnh,
trình bày hình ảnh, thống kê khối lượng, vv.
FORUM8 sẽ mở rộng sản phẩm của giải pháp
Allplan như hình thức kinh doanh mới cho kỹ
sư dân dụng và công nghiệp kiến trúc.
|
|
| Page Top
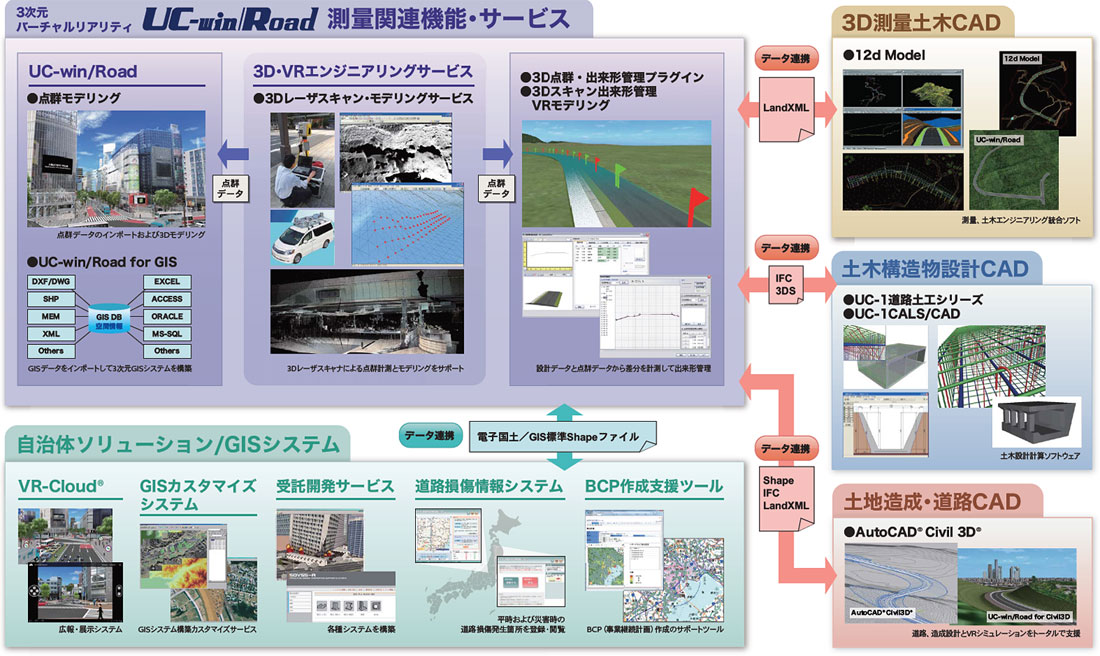
|
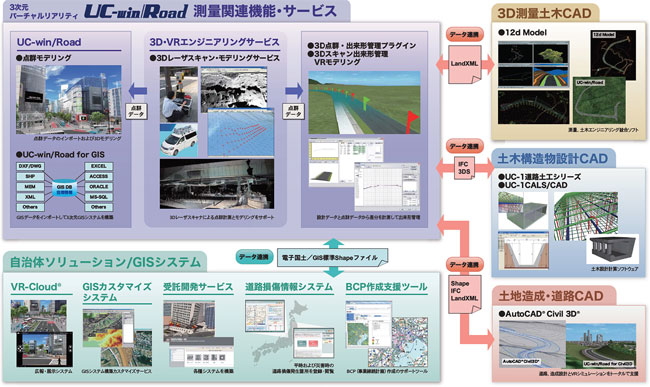
Giải
pháp khảo sát
Giải pháp tích hợp liên quan đến GIS/ 3D
Laser scanning/ Khảo sát 3D và kỹ thuật xây dựng
CAD
|
|
Chúng tôi cung cấp
tích hợp giải pháp khảo sát như là đo điện
toán đám mây bằng máy scan 3D laser và dữ
liệu mô hình điện toán đám mây VR thông qua
UC-win/Road; trao đổi dữ liệu giữa khảo sát
3D CAD và thiết kế hạ tầng giao thông CAD,
và hệ thống VR; và xây dựng hệ thống liên
kết với GIS đến công nghệ VR
 |
|
| Page Top
|
|
|