
通过与3DVR的结合,实现UAV的飞行计划制定、远程操作和记录采集。
程序概要
通过在UC-win/Road中设置通过点,并添加在通过点上的行动(拍照、开始录像等),就可以制定飞行计划。飞行计划制定完成后,信息会被上传到UAV中。然后,UAV自动起飞并执行指定的命令,最后自动着陆。飞行计划执行完毕后,照片和视频文件可以从UC-win/Road无线下载。
■对应机种
已验证: Ph3 Advavced、Ph3 4K、Ph3 Professional、DJI Phantom 4
Pro、Mavic Pro、Matrice 200系列、Matrice 600、Spark
未验证: Inspire 1

▲DJI Phantom 4 Pro

▲DJI Mavic Pro
相关信息
- ◆新闻
- FORUM8赞助[无人机编程竞赛](2018/03/02)
- FORUM8赞助商[CSAJ 无人机编程竞赛],提供SDK支援学生(2017/06/08)
Ver.6.0.0 更新内容<2021年 2月 26日发布>NEW
- 演示视频生成
- 点云生成(Proof of concept)
程序的功能和特点
图1为整个UAV操作系统。由DJI Phantom 3 Professional、遥控器、平板(Android 介面)、笔记型电脑(UC-win/Road 与 UAV插件)、Wi-Fi路由器(用于连接UC-win/Road 与 Android介面)所构成。

▲图1 UAV操纵系统
在图2左上有个UAV插件窗口,其可用来执行各种设定和即时资料的显示。图2左下为飞行计划编辑画面,通过设定通过点和在通过点执行的动作指示(拍照、摄影等)来制作飞行计划。飞行计划制作完成后,使用者可开始UAV的飞行。图3为执行飞行的区域。UAV将自动起飞、依照计划的飞行路线前进、最后抵达通过点后着陆。
图3
UAV下方的白线为其与地面垂直线的呈现,由此可更容易分辨UAV的高度。
通过遥控器,可手动记录通过点。
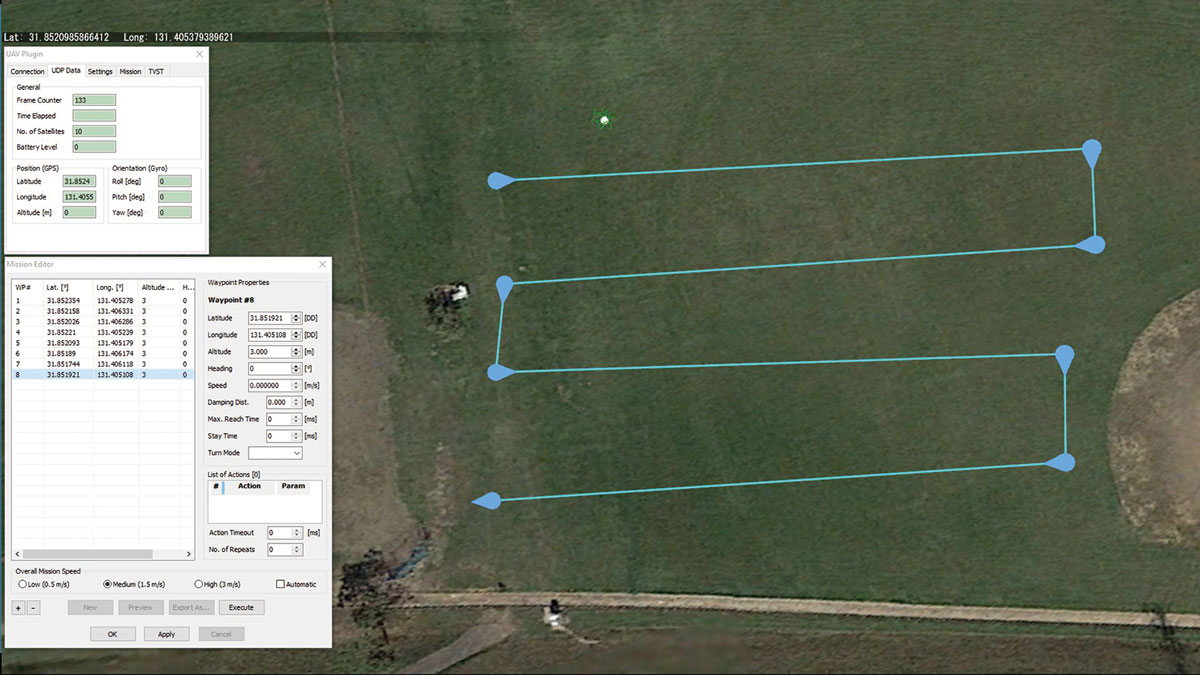
▲图2 在UC-win/Road上的
UAV插件和飞行编辑画面
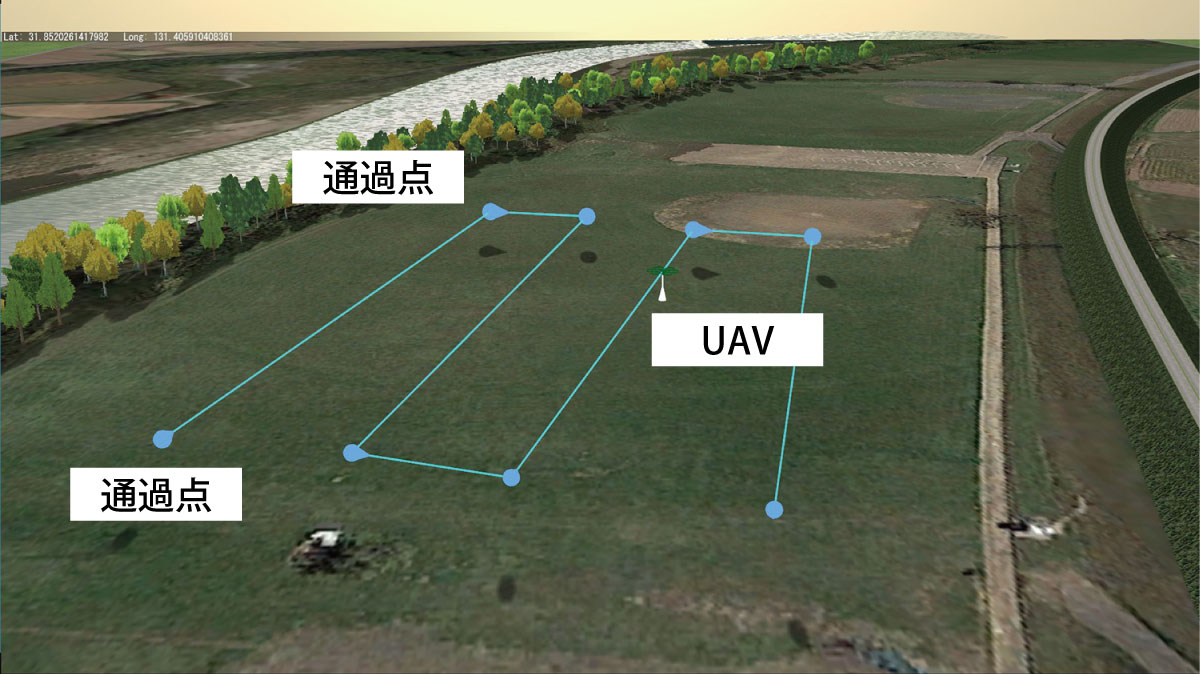
▲图3 飞行计划的执行
-
模拟器模式
-
不需使用其他应用软件,使用UC-win/Road就可以模拟飞行计划或者连接VR影像手动练习操作UAV飞行。
-
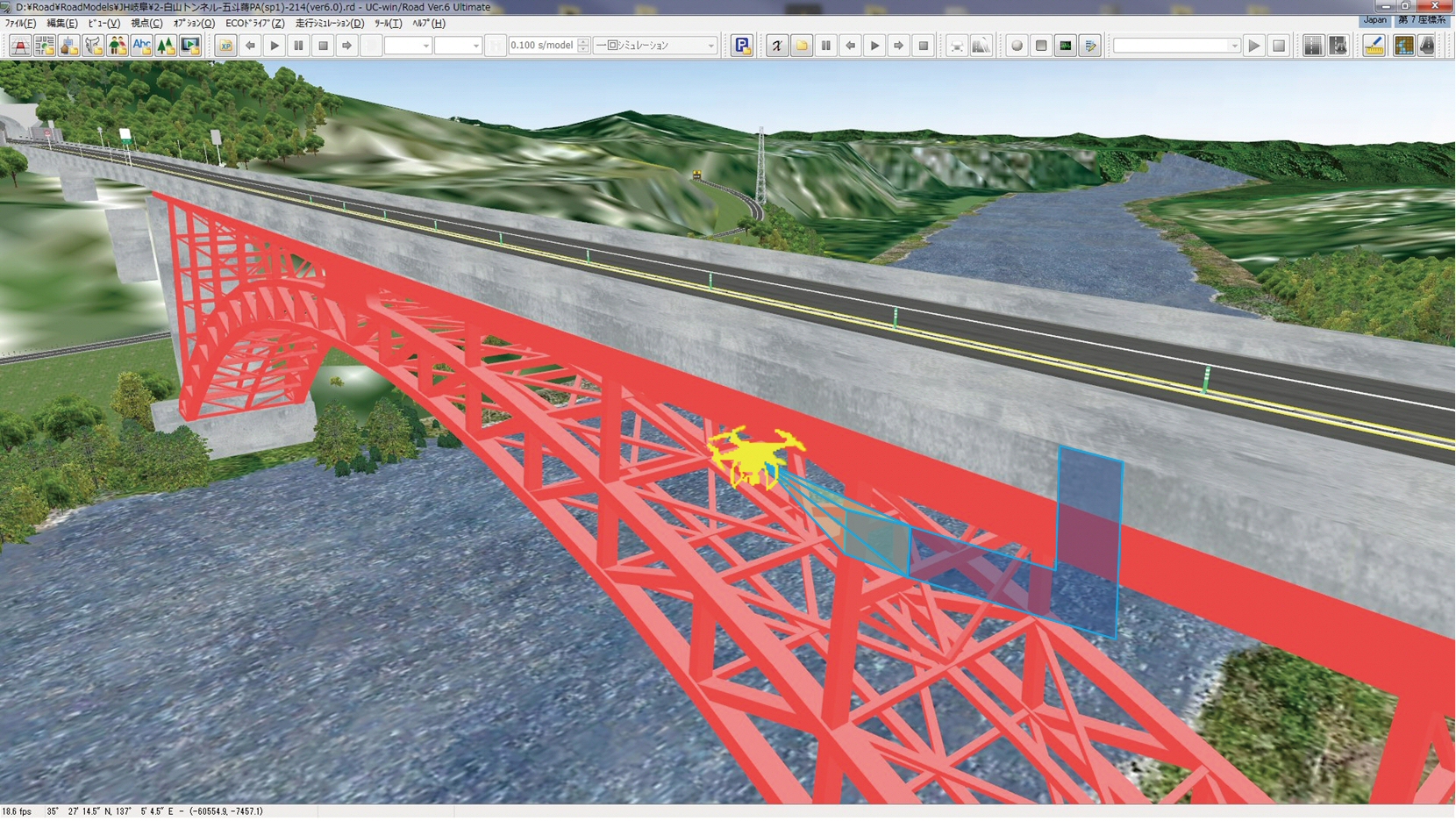
拍摄范围的显示
-
在3D环境中显示照片或影片所拍摄的范围等照相机相关信息,此功能可用于辅助路径制定。例如,用户可即时确认尚未拍摄的范围,并根据需要拍摄的范围制定飞行路径。
-
管理多台UAV
-
以往假设一次只执行一台UAV飞行,不过在较短的飞行时间内仅靠一台UAV飞行难以搜集广大范围。因此,通过将任务分配至多台UAV,可让各台UAV在各自负责的区域进行制图。同时,可使用UC-win/Road实时监视进行状况。
此外,目前主要运输公司正在调查是否有可能使用UAV送小型包裹,因此在近未来这样的功能对于UAV的发展和可能性会有极大的贡献。不过,实际使用UAV仍存在安全性问题。因此通过使用UAV的集中管理系统,可以避免飞行碰撞等事故。
▲实时显示拍摄范围

▲多UAV管理系统和任务分配

-
编辑飞行计划
-
用户可查找以往制定的飞行计划,将其导入至UC-win/Road执行或编辑飞行计划。目前在制定飞行计划后,将自动以制作时间为文件名保存。通过使用缩小图例和日期显示,可更易于查找飞行计划。
-
下载多媒体数据
-
通过在数据列表中显示SD卡内的文件,不仅可以选择需要下载的文件,也可以一次性下载所有文件。此功能缩短了获得视频文件的时间。
产品价格
-
软件价格
-
■软件价格
产品名
价格
产品構成
UC-win/Road UAV插件・选项 19,000元 单卖插件 ■浮动授权价格
额外支付定价的40%,可以在任意地点、任意电脑使用。
产品名
价格
UC-win/Road UAV插件・选项 7,600元
订阅价格
-
订阅价格
-
■服务内容
・免费提供版本升级 ・电话咨询技术支援
・咨询服务(电子邮件、FAX) ・下载服务 ・维护信息服务产品名 第1年订阅费用 往后每年 订阅(UC-win/Road UAV插件・选项) 免费 7,600元 订阅(UC-win/Road UAV插件・选项 浮动授权) 10,640元
租赁授权/浮动授权价格
■租赁授权:短期使用,价格低廉。
■浮动租赁授权:通过网络认证,可以在任意地点、任意电脑使用。
■临时租赁授权:可以在现有产品授权的基础上临时增加授权数量。以租赁许可期限(1到3个月)为单位进行授权,并根据使用记录进行收费。提前预约,可享受租赁授权15%的价格优惠。可以通过用户信息页面申请。
※租赁授权或浮动租赁授权开始后无法更改期限,如需延长期限需要再次申请。
-
租赁授权/浮动租赁授权
-
■租赁授权
产品名 2个月 3个月 6个月 UC-win/Road UAV插件・选项 8,550元 10,070元 12,350元 ■浮动租赁授权
产品名 2个月 3个月 6个月 UC-win/Road UAV插件・选项 14,250元 16,910元 20,900元 版本开发履历
-
版本开发履历
-
UC-win/Road UAV插件・选项 版本 发布日期 主要升级内容 6.0.0 21/02/26 - 演示视频生成
- 点云生成(Proof of concep)


LOADING
-
-