
|
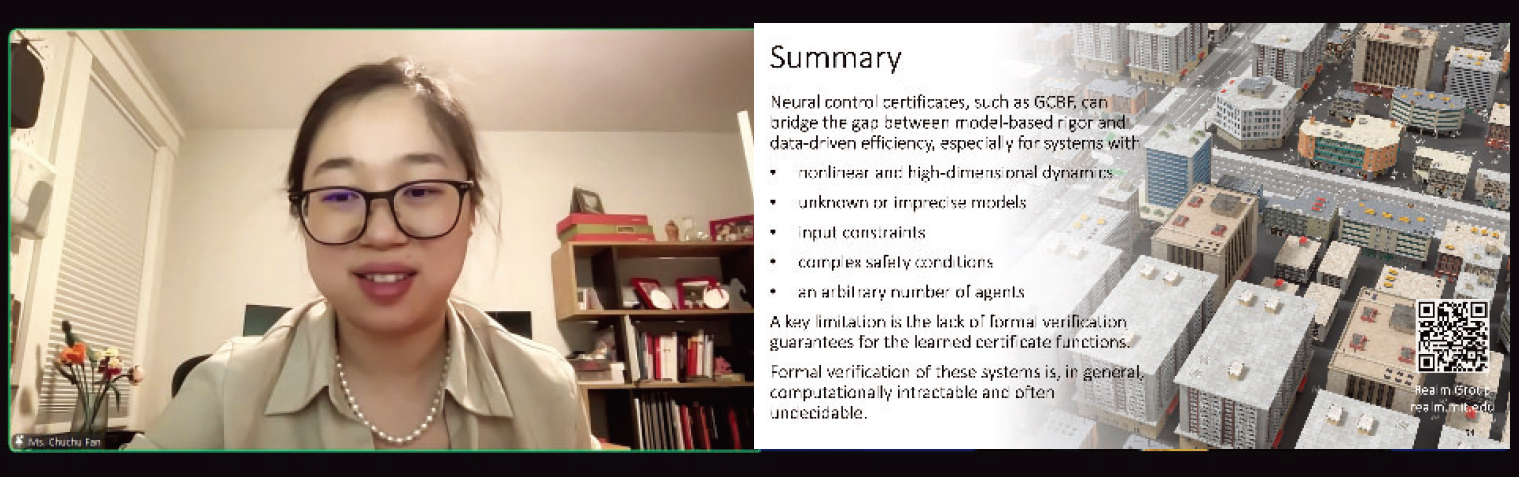
フォーラムエイトは、マサチューセッツ工科大学(MIT)の産学連携プログラムにより、2021年から毎年3月と9月に「MITスペシャルセミナー」を開催しています。10回目となる今回は、航空宇宙学部、情報意思決定システム研究所(LIDS)のChuchu Fan准教授をお招きし、「大規模自律システムの設計におけるニューラルネットによる安全性証明」をテーマにご講演いただきました。講演では、同氏の研究室が注力するニューラル証明関数と「グラフ制御バリア関数(GCBF)」を用いた、大規模で複雑なロボットシステムの安全な設計と制御に焦点が当てられました。
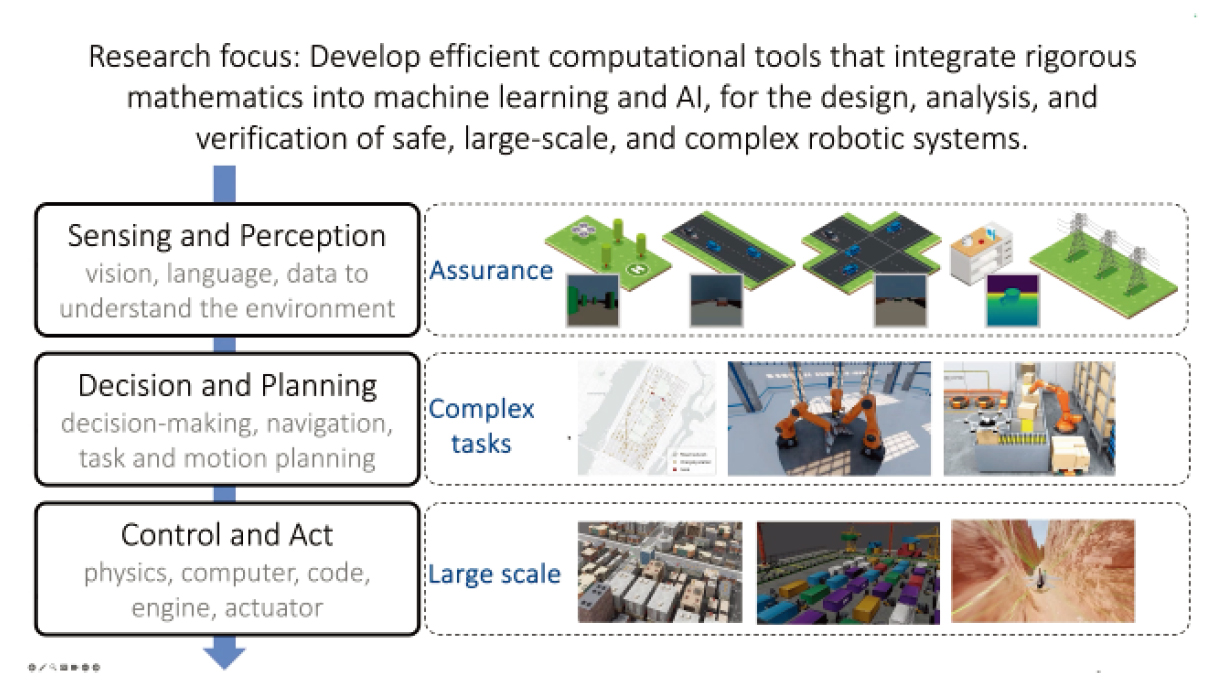
研究室のミッションと研究アプローチ 講演者の所属するLIDSは、複雑なロボットシステムを安全に設計するためのツール開発に注力しています。研究の中心は、制御の最適化と「フォーマルメソッド(形式手法)」を機械学習やAIと融合させることです。これにより、以下のような階層的な演算レベルで安全性を確保することを目指しています。
これらの研究は、ドローンや航空機といった飛行物体、製造現場のロボットシステムなど、様々な分野に応用可能とのことでした。
GCBFによる安全性と効率性の両立 講演の核心は、制御システムにおける安全性証明のツールとしての「制御バリア関数(CBF)」の説明でした。CBFは、システムの安全な状態を正の値、危険な状態を負の値で定義し、常に正の値に保つようロボットの動きを制御する理論的な手法です。これにより、システムが危険な状態に陥るのを防ぎます。
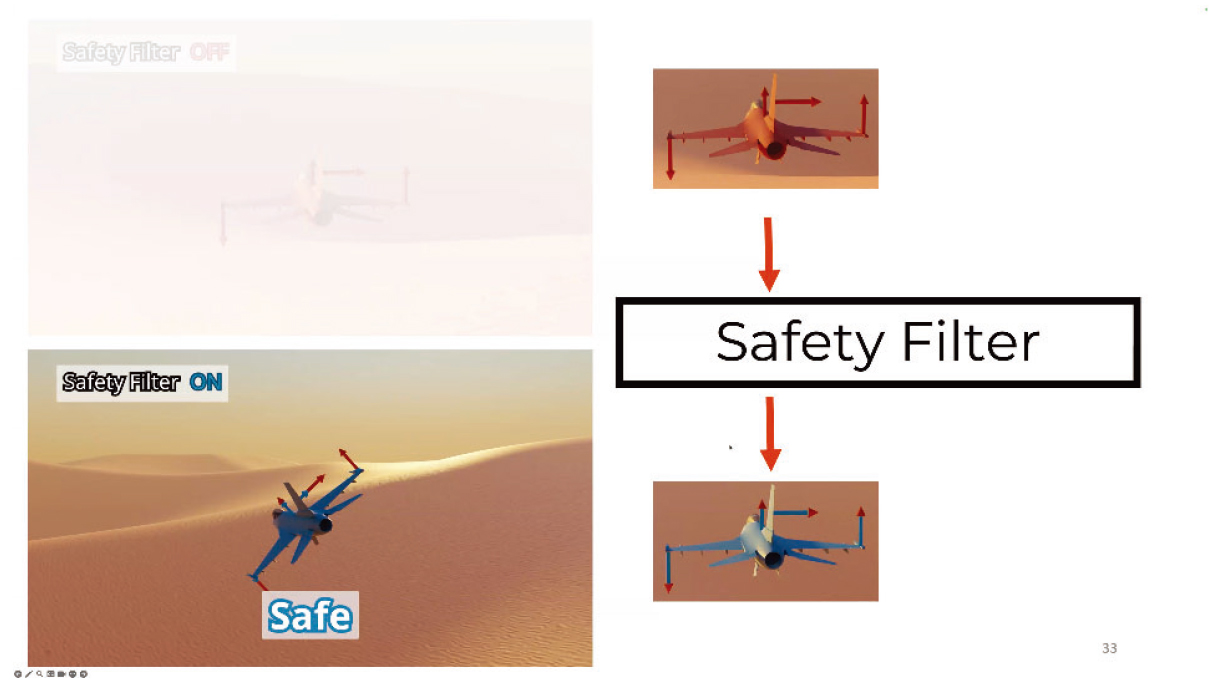
講演では、ドローンや車両のハードウェアでの実証例が動画で示されました。特に、ドローンが狭い回廊を飛行する、複数のドローンが秩序立てて狭いゲートを通過する、複数のドローンが協力して動くターゲットを追跡するなどの複雑なタスクを安全にこなす様子は非常に印象的でした。 GCBFの応用と展望 講演の後半では、GCBFを安全性フィルターとして利用するという画期的なアイデアが紹介されました。これは、既存の制御システム(例:人間パイロットによる操縦)に手を加えることなく、安全性を確保するためのものです。このフィルターは、元のコントローラーからの入力が安全でないと予測された場合、最小限の修正を加えて安全な行動へと導きます。これにより、操縦ミスやシステムの欠陥に起因する事故を未然に防ぐことが可能になるとのことです。レーシングカーや固定翼飛行機での実証例が示され、安全性フィルターの有効性が具体的に示されました。
GCBFは非常に有望なアプローチですが、講演者はその限界にも言及しました。GCBFはニューラルネットワークで学習された近似であるため、絶対的な安全性を形式的に保証することはできません。これは、スケーラビリティと検証可能性の根本的なトレードオフに基づいています。今後は、データ駆動型の柔軟性と証明可能な保証を両立させるハイブリッドアプローチを検討し、確率論的な保証を提供していくことが展望として語られました。
|
| (Up&Coming '25 秋の号掲載) |
|
||
|
|