ユーザ製品体験レポート

大成建設株式会社 本社土木本部機械部メカ・ロボティクス推進室
課長 若山 真則
中居 拓哉
使用製品 UC-win/Road
UC-win/Roadは、オープンデータや点群データなどを利用して各種プロジェクトの3次元大規模空間を容易にモデリングできる3DVRソフト。多様なシミュレーションに加えて、外部の各種ハードウェアやセンサー等との連携により、3DVRと現実世界がリアルタイムに連携させた遠隔制御・モニタリング・自動制御システムが構築できます。
ダム建設工事におけるデジタルツイン技術の活用について

大成建設株式会社 本社土木本部機械部
メカ・ロボティクス推進室課長
若山 真則(わかやま・まさのり)
1998年、大成建設(株)入社。2010年、本社土木本部機械部配属。17年より本報の業務に携わり、現在に至る。

大成建設株式会社 本社土木本部機械部
メカ・ロボティクス推進室
中居 拓哉( なかい・たくや )
2019年、大成建設(株)入社。20年、本社土木本部機械部配属配属、本報の業務に携わり、現在に至る。
はじめに
ー 南摩ダムの概要 ー
2022年より、建設機械における自動化施工技術を現場に本格導入した。はじめに、その現場となった『南摩ダム本体建設工事』について紹介する。
発注者 : 独立行政法人水資源機構
場所 : 栃木県鹿沼市上南摩町内
目的 : 洪水調整、流水の正常な機能の維持、水道用水の補給
形式 : コンクリート表面遮水壁型ロックフィルダム(以下CFRD)
諸元 : 高さ86.5m、堤体長356m、堤体積240万m3、総貯水容量5,100万m3
南摩ダムは、近代的な施工方法で建設される本格的なダムとしては国内で初めてCFRDを採用するダムである。CFRDは一般的なロックフィルダムと異なり、堤体の上流側表面をコンクリートフェイススラブで被覆することで遮水性能を持たせている。自動化施工は、ダム本体となる堤体の盛立工事及びコンクリートフェイススラブを保護するブランケット材の盛立工事に導入する。
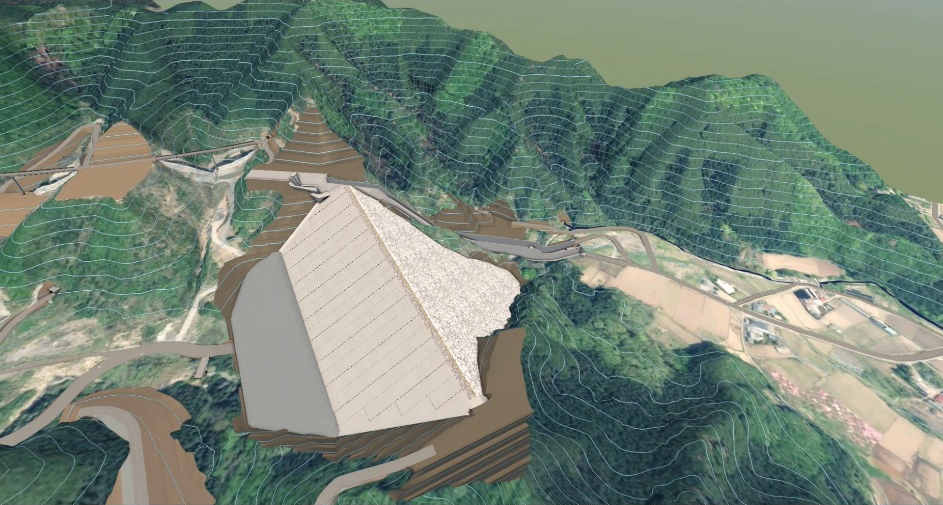
図1 南摩ダム完成予想図
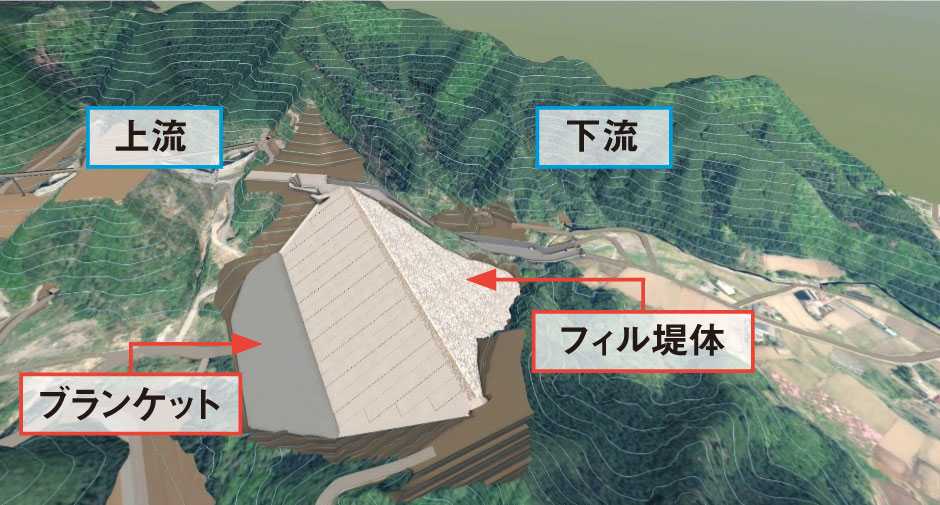
図2 南摩ダム堤体図
ー 自動化施工の概要 ー
生産労働人口の減少や高齢化が社会的な問題となる中、建設機械の自動化は、今後予想される人手不足への対応や安全性・生産性向上の観点から、建設現場で早期に望まれる技術の一つである。国土交通省では、2020年12月に「国土強靭化に関する施策のデジタル化」の中で、2025年度までに建設機械の自律制御・走行技術の確立を掲げている。同省ではさらに、技術の開発・普及促進のため、2022年3月に自動化施工の普及に向けた『建設機械施工の自動化・自律化協議会』を設立し、産官学によるメンバーで取組を行っている。
このような中、弊社はその解決策としてT-iROBOシリーズの自動建機を開発してきた。そして、更なる生産性の向上のため、複数の自動建機を協調制御するT-iCraftを開発し、南摩ダム工事において、実施工に導入した。
南摩ダムのフィル堤体における自動化施工では、T-iROBOシリーズの自動建機のうち、ブルドーザと振動ローラを各2台、合計4台で盛立工事を行う。各建機には操作室と通信するネットワーク機器や、位置情報を取得するためのGNSSアンテナなどが搭載されている。
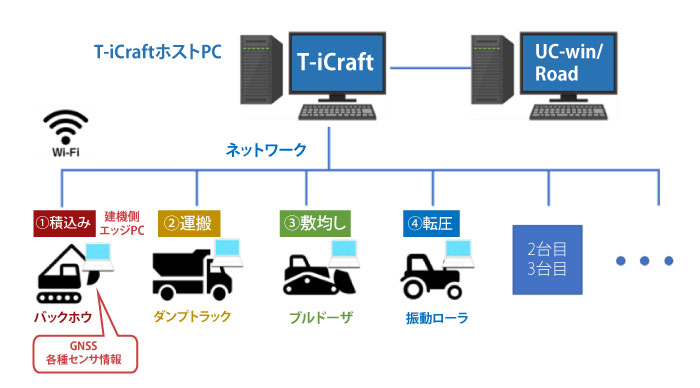
図3 自動化施工ネットワーク概要図
南摩ダム導入機種:
・ブルドーザ:CAT製D8T(32t級)
・振動ローラ:酒井重工業製SV900(20t級)
これらの建機の位置情報や施工タスク、車載設備状況などの各種情報は、ネットワークを介して協調制御システムであるT-iCraftへと送られる。管理者はこれらの情報を映した画面や、俯瞰カメラの映像等を見ながら、施工状況の管理を行う。
UC-win/Roadとの連携
自動化施工を行うにあたり、デジタルツイン技術を用いた3Dモニタリング及び接触防止システムを構築した。これは、CPS (Cyber-Physical-System) の概念に基づき、施工中に得られる情報を仮想空間上に集積・統合させ、高付加価値な情報として工事関係者間へフィードバックすることで、現場管理の支援、生産性の向上をはかる技術である。
UC-win/Roadのオプションである『点群モデリングプラグイン』を用いて現場を仮想空間上に再現し、そこへT-iCraftに送られてきた自動建機の位置情報、有人建機や作業員に装着したGNSSの位置情報を、3Dモデルと紐づけて連動表示させることで、仮想空間上に現在の現場状況をリアルタイムに再現する。

図4 自動化施工状況(俯瞰カメラ)

図5(1~5)自動化施工状況(UC-win/Road)




これらの位置情報に加え、各建機や作業員には警報範囲と非常停止範囲を指定する。各3Dモデルが位置情報に連動して動くことで、自動建機同士や自動建機と人の近接を検知することが可能となる。検知の状況により、現実空間の建機や作業員に対して、黄色い警報範囲が重なったらブザーによる警報通知を、赤色の非常停止範囲が重なったら自動建機を非常停止させるシステムとした。
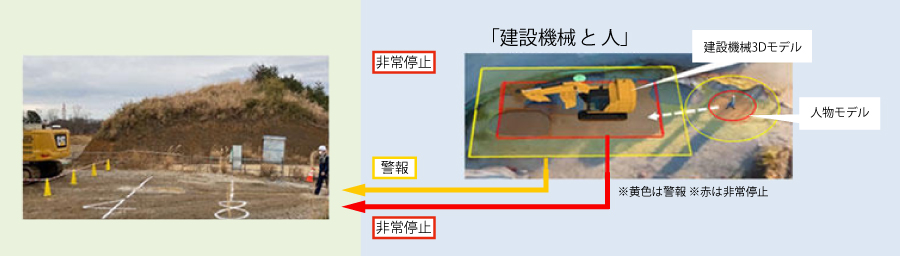
図6 接触防止システム概要図
UC-win/Roadと連携するメリットとしては以下のようなものが挙げられる
- カメラと異なり視点位置が固定されないため、さまざまな角度からリアルタイムでモニタリング可能
- 自動建機に搭載されたGNSS端末の位置情報を用いるため、新たなセンサーの追加が不要
- 重機や人の3Dモデルを用いるため、接触に関して建機の全方位をカバー可能
- 接触防止のための警報範囲、非常停止範囲を車両の形状に合わせ任意に設定可能
自動化施工は未だ開発途上にあり、日々進化させながら施工を行っている状況である。自動建機による施工の安全をどのように担保するか決まったルールが無い現状において、本システムのメリットは大きく、安全管理上のダブルセーフティの1つとして、自動化施工における活用が期待できるものである。
おわりに
今回、建設工事における施工管理・安全管理のツールとしてUC-win/Roadを活用し、自動建機の3Dモニタリング及び緊急停止システムとしての運用を行った。仮想空間を活用することで、今までは難しかった最適な視点からのモニタリングや自動接触防止システムなど、遠隔施工・自動化施工に新しい管理手法を提供するツールとして期待される。
お礼
11月16日に開催された第21回3D・VRシミュレーションコンテストでは、グランプリ(最優秀賞)という名誉ある賞を頂きました。本開発にご協力いただきましたフォーラムエイトの方々、関審査委員長を始めとする審査員の方々、クラウドにてご投票いただきました方々に、この場を借りて厚く御礼申し上げます。
第21回 3D・VRコンテスト オン・クラウド表彰式


第16回 フォーラムエイト
デザインフェスティバル2022
開催日
2022年11月16日(水)
会場
品川インターシティホール
刻々と変化する現場の状況をリアルタイムで管理し、重機だけでなく人などにも反応するセンサの開発、重機メーカーの違いに左右されないマネジメントシステムの構築など、大変素晴らしいとのコメントが寄せられ、審査員満場一致でのグランプリ受賞という結果となりました。
【参考】
- 中居 拓哉,若山 真則,小森 聡:デジタルツインによる接触防止システム,令和4年度土木学会全国大会第77回年次学術講演会,2022
- 中居 拓哉,若山 真則,小森 聡,田中 真由子:自動建機群の協調制御システム「T-iCraft」の実証,令和3年度土木学会全国大会第76回年次学術講演会,2021
- 若山 真則,小森 聡,中居 拓哉:自動建機群の協調制御システムの実証,建設機械施工 Vol.73 No.12 December 2021 p.63-p.67
- 国土交通省:建設機械施工の自動化・自律化技術,
https://www.mlit.go.jp/tec/constplan/sosei_constplan_tk_000049.html
(Up&Coming '23 新年号掲載)
|
||||||||

 Up&Coming |
