Kinect pour Windows intègre des fonctionnalités de KinectTM et permet le développement d'une application personnalisée ou d'un environnement personnalisé à la volonté de l'utilisateur. Le couplage de KinectTM avec UC-win / Road permettra l'utilisation de UC-win / Road sans contrôleur physique tel qu'une souris ou un volant.
Un géant de la construction de la ville
Le nouveau Kinect V2 peut détecter des joints plus humains, par exemple
le capteur peut dire si le sujet a sa paume ouverte ou fermée. FORUM8 a
développé un système innovant pour la modélisation 3D de villes qui permet
aux utilisateurs UC-win / Road de construire des infrastructures civiles
dans un modèle de ville virtuelle, du point de vue du géant, comme s'il
était un géant.
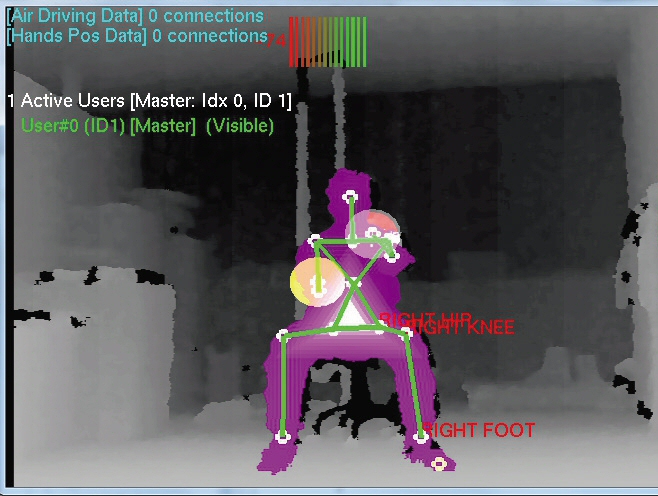
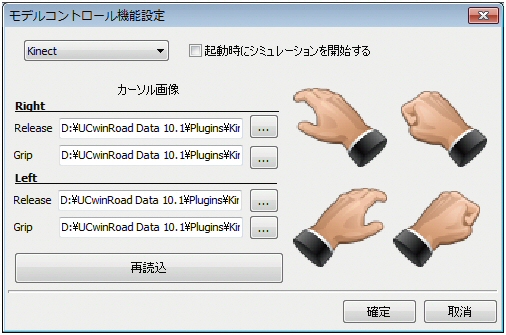
- Affichage du curseur: Le sujet debout devant un dispositif de détection
de profondeur avec sa main vers le haut est détecté comme une structure
squelettique unique à partir d'une carte de profondeur. Un curseur est
alors affiché sur l'écran où la main gauche ou droite du sujet chevauche
l'écran s'il y avait une ligne droite invisible perpendiculaire à l'écran
reliant sa main à l'écran.
- Positionner une infrastructure (à droite): à partir d'un menu d'icônes
représentant différents types de structure qui peuvent être positionnés
dans la ville virtuelle, déplacez le curseur sur une icône de votre choix,
fermez votre paume pour saisir cette structure, Emplacement que vous souhaitez
placer la structure, et ouvrez la paume pour déposer la structure à cet
emplacement.
- Contrôlez la caméra ou les modèles à l'aide de la main gauche: Si vous
placez le curseur sur une icône de votre choix en utilisant votre main
gauche et faites un poing, vous pouvez contrôler la position de la caméra
(pivoter, bouger ou sauter) ou prendre le contrôle du modèle Enlever la
structure positionnée - annuler - ou réinitialiser le modèle de ville à
la valeur par défaut.
 |
|
 |
 Un visiteur construit un pont au sein d'une ville virtuelle pendant une
expo Un visiteur construit un pont au sein d'une ville virtuelle pendant une
expo |
|
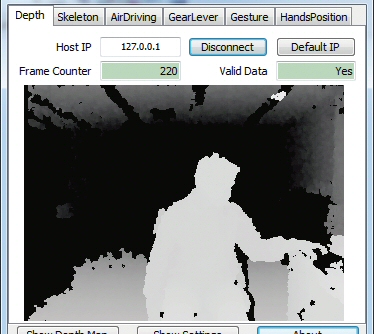
Fenêtre de réglage de l'image du curseur |
|