| Kinect Plugin đặt dữ liệu nhập từ cảm biến
sâu để hoạt động đầy đủ. Các thiết bị có thể hoạt động cùng
với trình cắm là KinectTM Sensor cho Xbox, Xtion Pro và
Xtion Pro Live. Tất cả 3 cảm biến này đều có khả năng cảm
biến sâu dựa trên công nghệ PrimeSense, với một máy chiếu
hồng ngoại chiếu ra một mẫu ánh sáng hồng ngoại rơi xuống
các vật xung quanh nó giống như một biển các dấu chấm và một
camera hồng ngoại có thể nhìn thấy các chấm đó. Với sóng ánh
sáng hồng ngoại ở khoảng 780nm, những chấm này không nhìn
thấy được bằng mắt thường, nhưng nhìn thấy được bằng máy ảnh
nhìn đêm (xem hình 1). Máy ảnh gửi nguồn cấp dữ liệu video
của mẫu dấu chấm sai lệch này vào bộ xử lý cảm biến sâu, và
bộ xử lý hoạt động ở độ sâu từ sự dịch chuyển của các chấm.
Trên những vật thể gần đó, khuôn mẫu được trải ra, trên các
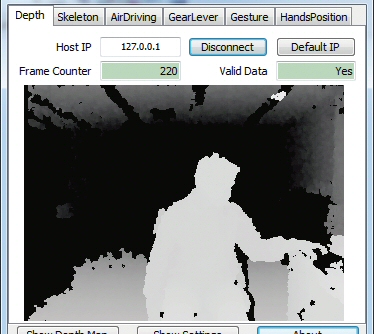
đối tượng xa, khuôn mẫu này dày đặc. Bản đồ chiều sâu 'đã
tạo ra' này có thể được đọc từ cảm biến chiều sâu trong máy
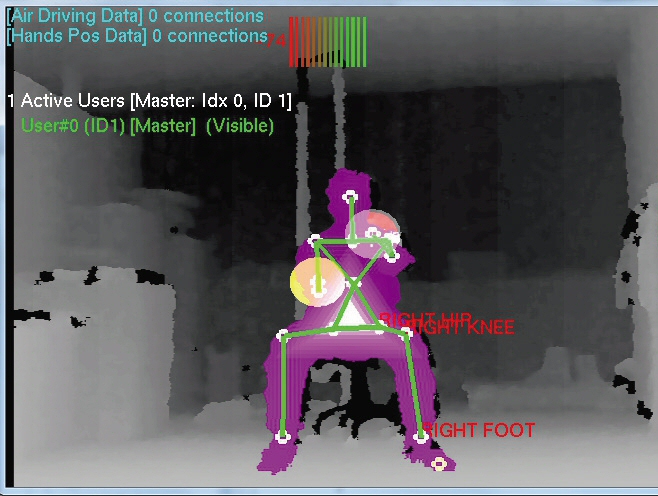
tính. Bản đồ độ sâu được phân tích bằng cách so sánh và đối
chiếu các mẫu dấu chấm trên cơ thể mỗi người, phát hiện bởi
cảm biến, chúng xác định cấu trúc xương của một người để tìm
ra ai là ai. |
|
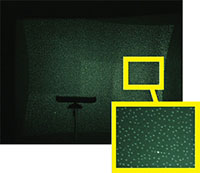
 Hình 1 Mẫu ánh sáng
hồng ngoại Hình 1 Mẫu ánh sáng
hồng ngoại |