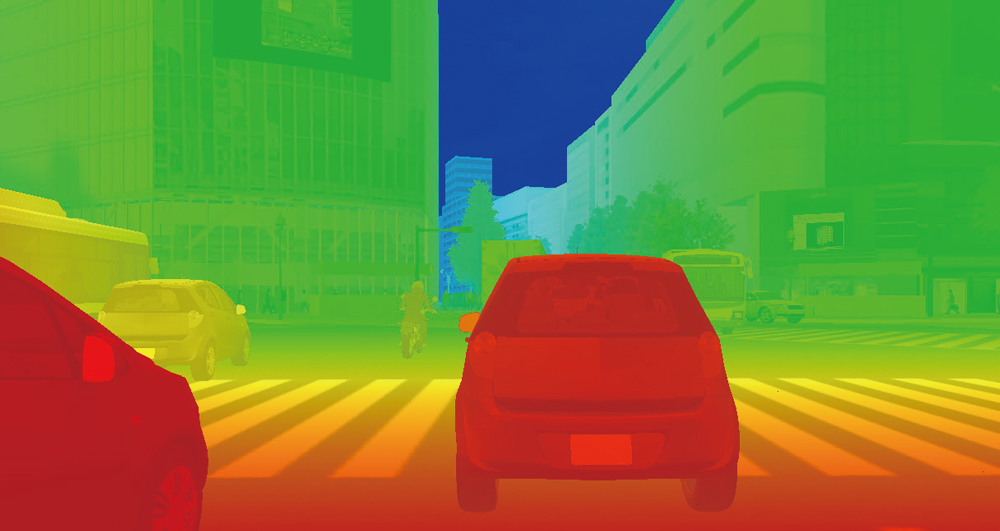
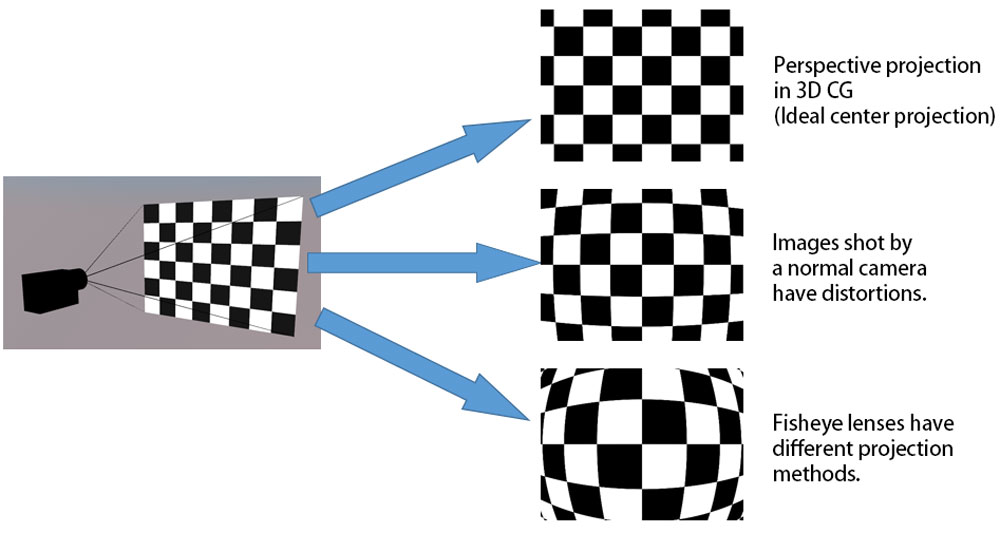
| Phép chiếu phối cảnh được vẽ trong phạm vi của
hình chóp vuông với vị trí điểm nhìn ở đỉnh là thông thường
đối với việc dựng hình 3D CG, phương pháp này cũng được sử
dụng cho việc hiển thị trong UC-win / Road. Đối với máy ảnh
thực tế, phép chiếu tâm là phương pháp tương tự như phép
chiếu phối cảnh CG. Tuy nhiên, nó không phải lúc nào cũng
phù hợp với phép chiếu phối cảnh bởi vì các ống kính này
cũng có biến dạng ở một mức độ nào đó. Hơn nữa, đối với ống kính mắt cá có góc nhìn rộng, phương pháp chiếu được sử dụng không phải là phương pháp chiếu tâm, mà là phép chiếu khoảng cách đều có khoảng cách từ tâm tỷ lệ với góc, và phép chiếu góc cân bằng có diện tích từ tâm tỉ lệ thuận với góc khối. Trình cắm/ mã nhúng này đã được phát triển để đạt được mô phỏng chụp bằng máy ảnh thật trên UC-win / Road. |
 |
||
và máy ảnh thực tế |
|||