|
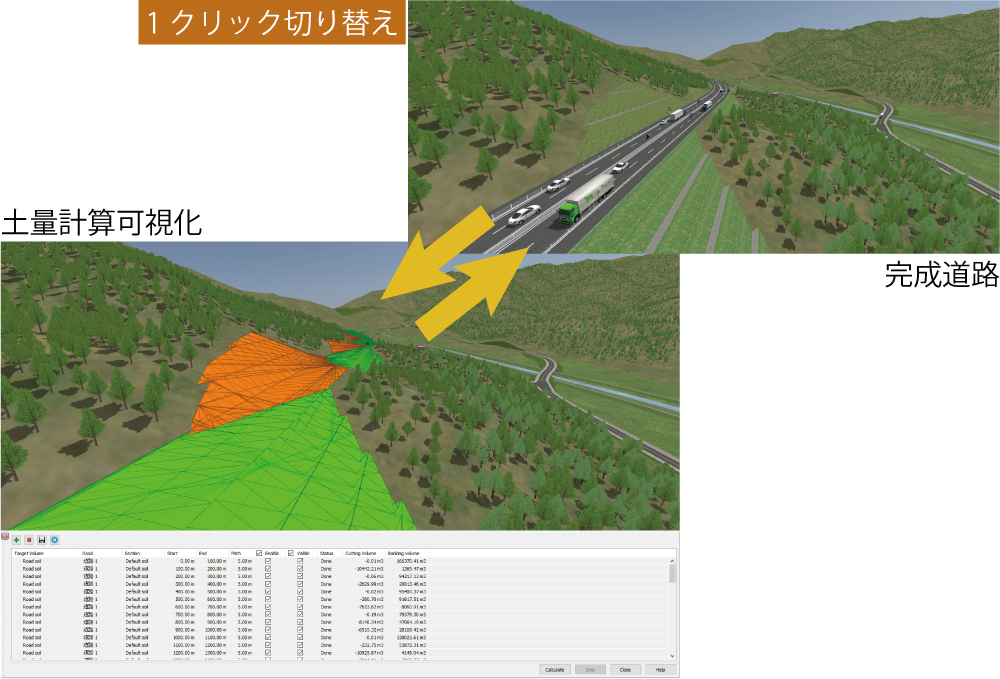
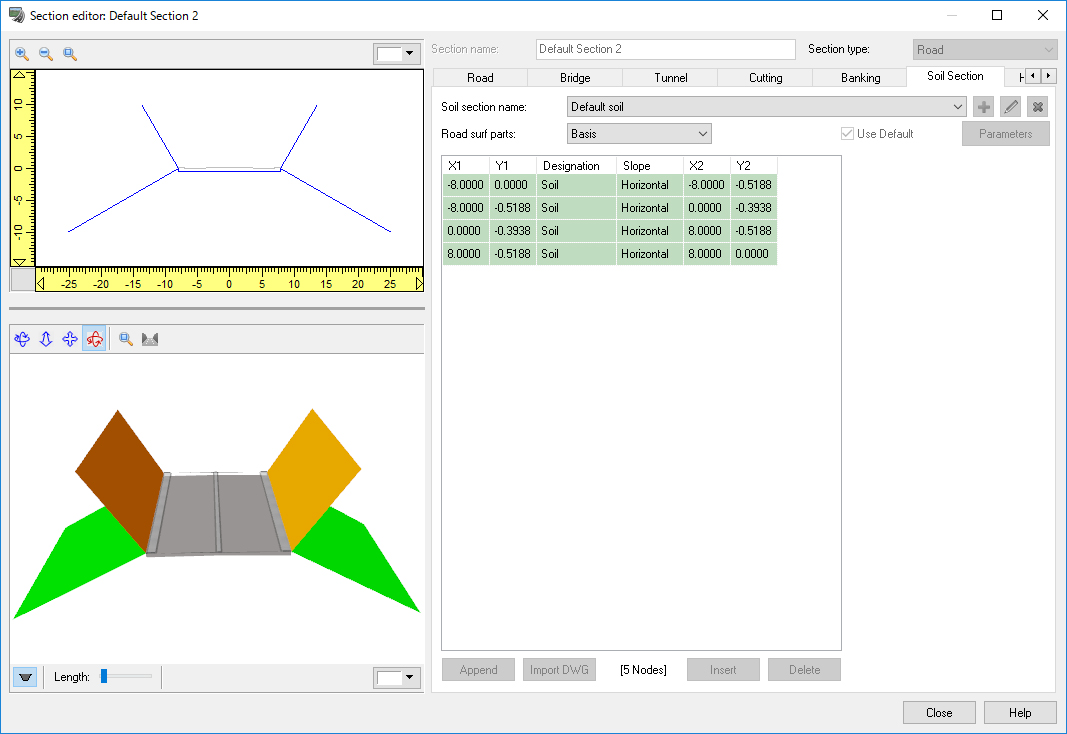
在UC-win / Road Ver.13中,增加了土方量计算功能作为新功能。土方量计算功能,使用了在程序中创建的道路和地形的三维形状,可以计算道路的土方量的近似量(图1)。 近年来,对土木工程领域中的三维数据的利用受到关注,并且在数量计算中也正在进行关于使用三维形状进行计算的探讨。作为本 功能的计算方法,不采用现有的土方量计算方法的平均截面法,而是使用三维形状来计算土方量的方法。 计算道路面与地形表面的交叉点,将地形表面路面上方的区域(=填充区域),从道路面的地形表面上方的区域(=剪切区域)进 行分割。使用分割后的三维表面形状数据,计算上表面和下表面之间的体积。 对于计算时产生的路面,不用设定原来的道路横截面就可以定义土木工程用的横截面。与传统道路横断面的定义一样,它由建筑基 础部分的定义和填土/切土的合法表面定义来定义。此外,由于它也被设计为使用现有路段自动创建默认土方截面,因此仅需要照常制作数据就可以计算土方量而无 需任何其他输入(图2)。 在土方量计算中,输入目标道路,土方截面,部分(开始距离,结束距离)、道路的生成间距并进行定义。可以逐个定义,当进行 某一部分的土方量计算或者从横截面开始到结束的部分的土方量计算时,也可以进行批量定义。通过对每个部分进行计算,根据不同部分的计算,可以探讨哪个部分 的土方量大的成本多少问题。它也可以用于多个土方截面的不同横截面的比较研究。 |
|
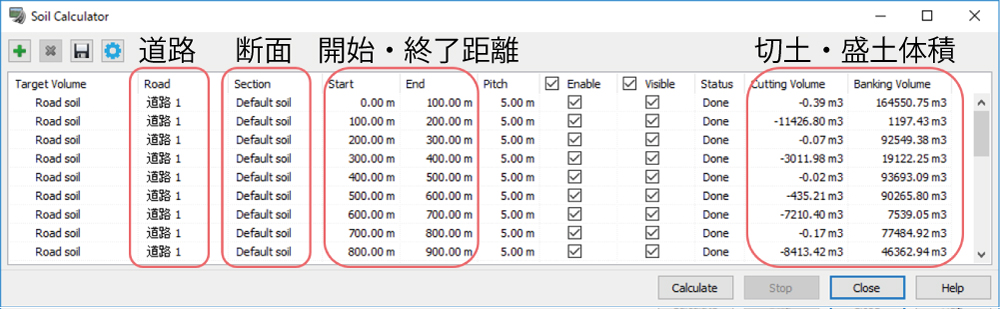 |
| 图3 土方量计算的画面 |
当执行计算时,在土方量计算屏幕上显示填土和切土的体积。此外,如果让3D画面的显示有效,可以显示已经设定的填土和切土的表面,可以 在 视觉上把握土方量。考虑到计算结果与电子表格软件的合作,可以用逗号分隔的CSV或制表符分隔输出计算结果。
最后,UC-win/Road Ver.13作为土方量计算功能的道路的土方量概算的对象实现了,今后,未来,为了推动土方量计算功能的扩展,也正在应对包括结构的体积计算,土地形成的 土方量计算。