The OpenStreetMap is a project that volunteers create a freely available map on the internet. The map created in this project is open on browsers and free to use on websites. The vector data can be used for the purpose of merchandise too.
The GIS map is provided by the Geospatial Information Authority of Japan (GIS). The users have to obey the terms of service defined by the GIS to use the high-precise map data.
To import online map data, first define a zone where you want to download a map. Click the import button in the zone edit screen. The data will be automatically downloaded, and buildings and forests are displayed.
 |
 |
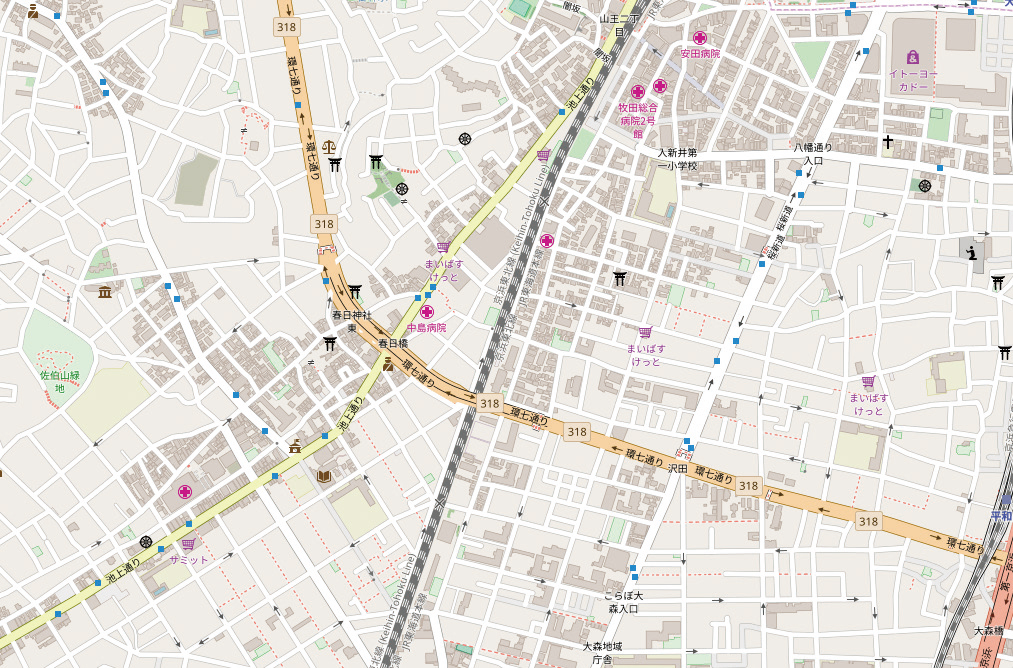
| Fig.1 OpenStreetMap data | Fig.2 Map data imported from the OpenStreetMap |
If the height data is included in the map data, objects at that height are created. If not, the default height is used. The created buildings and forests can be edited.
| Users can edit models one by one or the whole buildings or forests. For
building objects, height, colour, and model category can be changed. For
forest editing, kind and number of tree, height, and rotation angle can
be selected.
Since more objects than you required may be created depending on the map data, users can select whether to create each building and forest model or not. The development to import map data services other than the OpenStreetMap and GIS map is ongoing. Please let us know a database you want to use. |
|