| New Products & Service | |||||||||||||||||||||||||
|
自动驾驶套件 安全驾驶模拟器获得日本国家公共安全委员会的牌照类型认证 ●新品价格未定 ●发布2021年1月 |
|||||||||||||||||||||||||
|
在UC-win/Road的模拟中,自动驾驶套件应被用于“自动驾驶研究模拟”,“ ADAS”和“传感器数据模拟”(见图1)领域。 它是一个插件包,由表1中的插件组成。 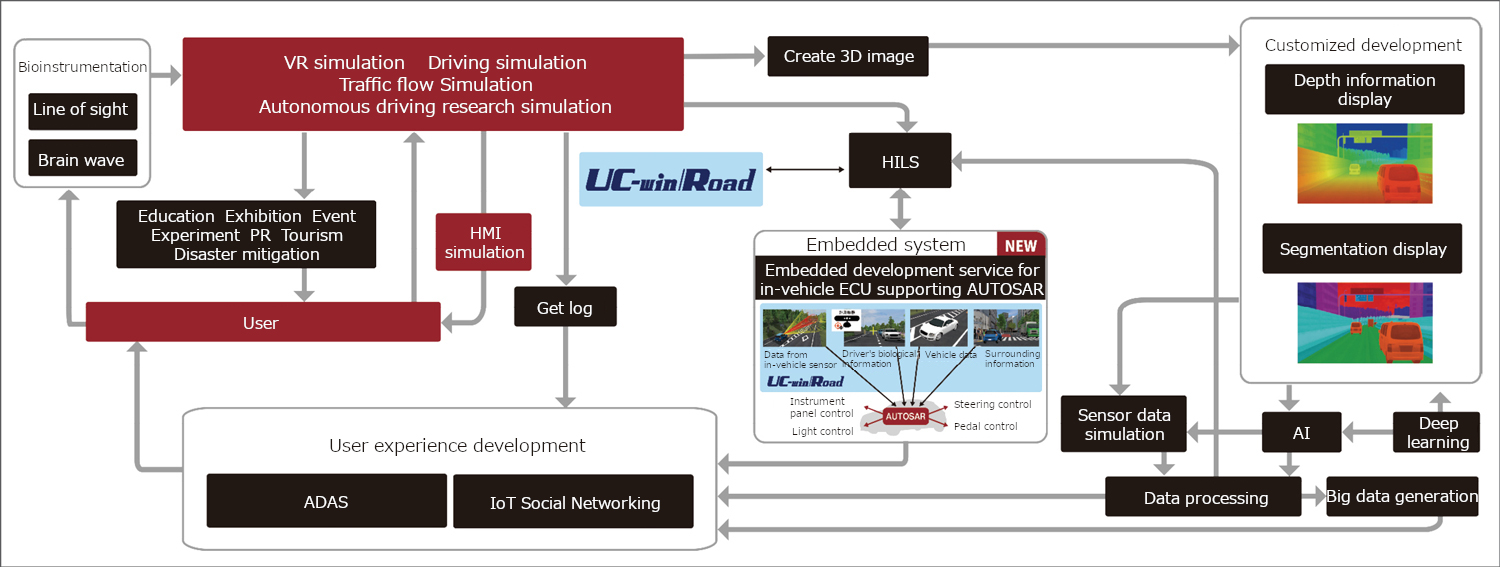 图1通过UC-win/Road进行的各种VR模拟与自动驾驶套件之间的关系
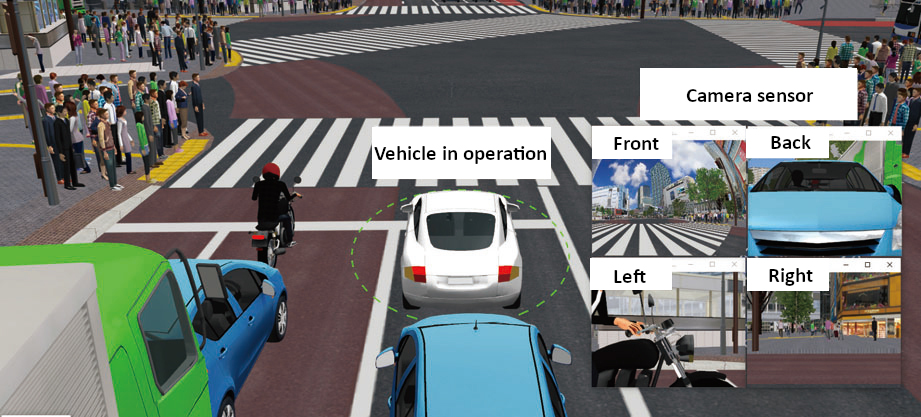
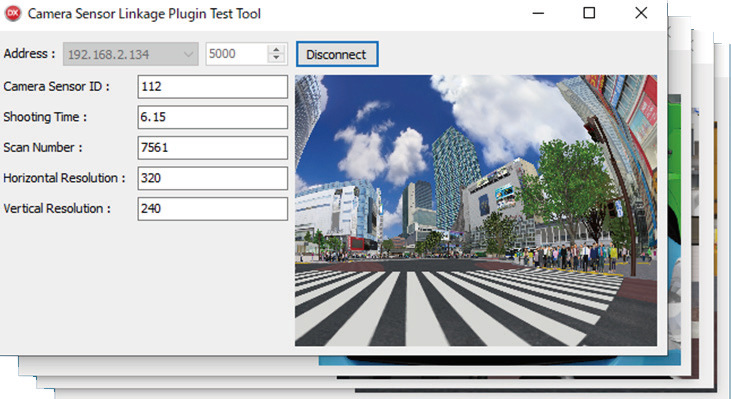
表1 自动驾驶套件简介 ※2 已经商业化的插件(Up&Coming No.117中已有介绍) ※3 摄像头模拟器基本插件拓展功能 ※4 摄像头模拟器基本插件拓展功能 驾驶信息IO应用程序 它是独立于UC-win/Road的应用程序,并将驾驶车辆的转向角,加速器和制动信息从IO设备发送到UC-win/Road。它还接收UC-win/Road操作信息,并在IO设备上反映力反馈等。 第一个版本支持游戏控制器(Logitech G29)和InnoDS CDS / MDS / MotionDS(3DOF)。 将来,我们将逐步支持SENSO Wheel等。 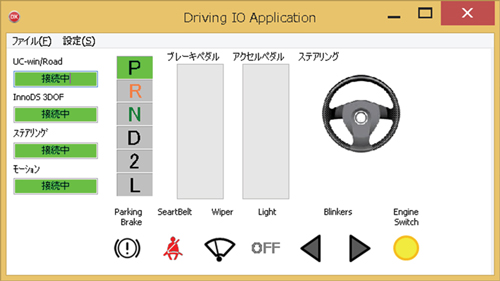 图2 车辆驾驶模型选择画面 车辆控制插件 车辆控制插件与外部车辆运动模型一起使用,以将有关行驶车辆的信息发送到外部系统,并从外部系统操作车辆。 (1)CarSim连接功能 由CarSim(虚拟力学)计算出的车辆行为反映在UC-win / Road车辆中。 (2)与其他外部车辆运动模型的联动功能 它可与HILS等外部车辆运动计算系统配合使用。 运动计算所需的车辆信息从车辆控制插件发送,从车辆运动计算软件发送的车辆运动结果信息被接收并反映在UC-win/Road的车辆中。 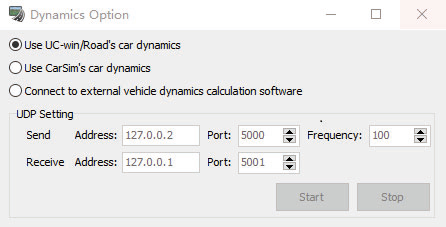 图3 车辆驾驶模式选择画面 (3)与驾驶信息IO应用程序的链接功能 它通过TCP通信和UDP通信与操作信息IO应用程序一起工作。结果,从外部设备发送的车辆信息(踏板,操作角度等)可以被外部车辆运动模型接收,并最终反映在UC-win/Road的驾驶车辆中。 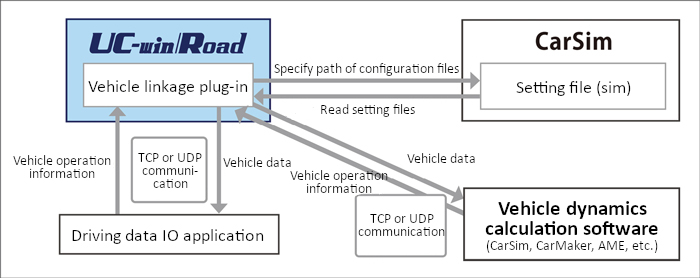 图4 车辆控制插件_行车信息IO应用协作图 摄像头传感器模拟系统 摄像头传感器模拟系统可以在UC-win/Road中处理摄像头,使其更接近真实摄像头并生成失真的图像。 通过在每个摄像头传感器的安装位置安装与UC-win/Road主屏幕不同的摄像头,即使在驾驶操作期间,您也可以检查每个传感器的图像。 另外,可以通过UDP通信将图像发送到外部系统。 将来,我们将逐步支持可视化传感器,传感器屏幕记录功能等可以绘制的范围(频谱)的可视化。
|
|||||||||||||||||||||||||
| (Up&Coming '20 秋季刊) | ||
|
