| New Products & Service | 模拟 | ||
发布2022年2月 |
|||
|
|
|||
支持 ASAM OpenDRIVE
在UC-win/Road 16.0中提供对ASAM OpenDrive®文件的导入和导出功能。
OpenDRIVE®是通过ASAM(Association for Standardization ofAutomation and Measuring Systems)推进高级自动驾驶的高精度道路网络的国际规格标准。
存储在 OpenDRIVE®文件中的数据为道路、车道以及交通标识等道路构成物的几何信息,也可记述信号灯等道路沿线的特征。
OpenDRIVE®的目的是向对ADAS及AD功能进行开发验证的模拟提供可使用的道路网络,通过使用OpenDRIVE®能够实现不同模拟器间道路网络的交换,减少制作及更换道路网络文件的成本。
在UC-win/Road 16.0中可通过OpenDRIVE®与外部软件进行道路网络(道路、车道)的交换,以削减模拟成本。
通过将外部软件制作的道路网络使用OpenDRIVE®导入,可在UC-win/Road上进行驾驶模拟。此外,通过OpenDRIVE®导出的UC-win/Road中的道路网络也可运用在外部软件中进行模拟。
近年来,高精度地图在ADAS和AD功能开发验证中的应用已成为必不可少的一环。今后为了进一步利用UC-win/Road进行这些开发验证,我们计划加强OpenDRive®的数据输出功能以及进一步进行模拟的开发。
 |
 |
 |
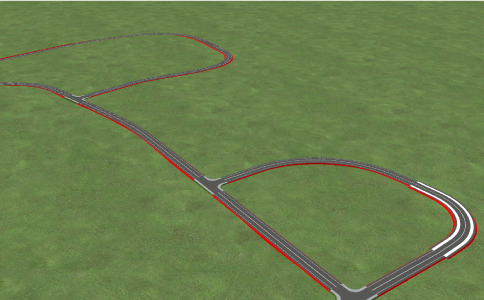 |
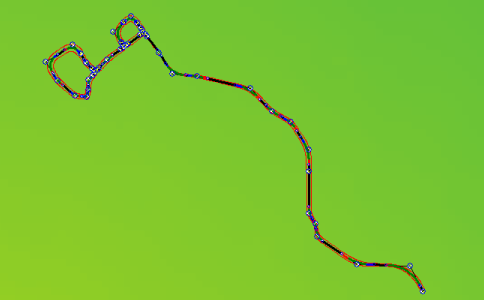
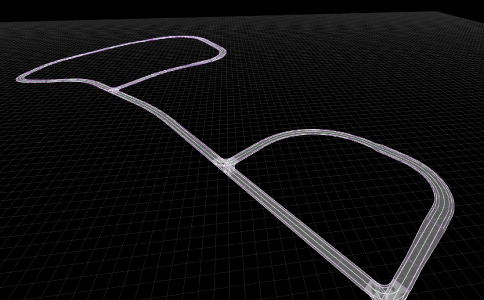
| 图 1 OpenDRIVE®viewer(左),导入UC-win/Road的结果(右) | |
扩展驾驶模拟的集群联动功能
在与自动驾驶、ADAS 和交通安全有关的研究与开发中需要对模拟对象车辆和自行车周围的车辆、行人和交通状况进行模拟,但很难通过模拟来重现难以模拟的人类特定行为、意外反应和精细运动。因此,我们以前一直提供多用户群集功能作为UC-win/Road的可选功能。之前,我们提供了对主要车辆制作脚本以实现其他用户对周边车辆、自行车、步行者进行控制的集群联动功能。
现在可以对参加模拟的全部用户进行单独脚本的控制。此外,为了确保整个模拟的完整性,环境模拟对所有用户都是通用的,对各用户发生事件的时机、显示的信息(声音、HUD内容等)进行单独的控制。
应用示例包括:
- 在多个驾驶员在同一环境中行驶、干扰和交互的情况下,可以构建模拟,以单独控制向每个驾驶员提供的说明、警告等。
- 在考虑紧急车辆与其他车辆的交互时,您可以创建一个方案,使交通情况相同,同时为每个乘客运行单独的方案,其中不同的事件发生。
- 在工程机械和重型设备仿真中,可以根据每个驾驶员的情况显示信息,并根据协作结果为场景创建事件。
 |
| 图 2 驾驶员1画面(左),驾驶员2画面(右) |
基本功能的优化
• 键盘操作自定义设置
您可以自由设置键盘上的对应按键,以便在主屏幕上进行视点、跑步、飞行、行走等移动操作。您还可以删除不使用的命令的对应键位并禁用该命令。
• 天气模拟的连续变化
在打开和关闭雨、雪、风和雾的天气表示形式和参数更改时,我们进行了改进,以渐变为设置的值。您也可以像以前一样立即进行更改,并设置更改所需的时间。
在演示中,天气变化流畅且精美,可提升项目的整体印象。此外,作为模拟功能,可以更逼真地表现雨量逐渐增强以及浓雾的效果。
• 改进的渲染
改进了环境映射对交通车辆的反射,以及夜间场景中半透明多边形的照明反射,从而实现绘制更逼真的场景。
| (Up&Coming '22 新年刊) |
|
|

