| New Products & Service | CG・VR | ||||||||||||||
●PriceUltimate: USD17,200 Driving Sim: USD11,000 Advanced: USD8,800 Standard: USD6,000 CIM Lite: USD4,800 ●ReleaseJune 3rd 2022 |
|||||||||||||||
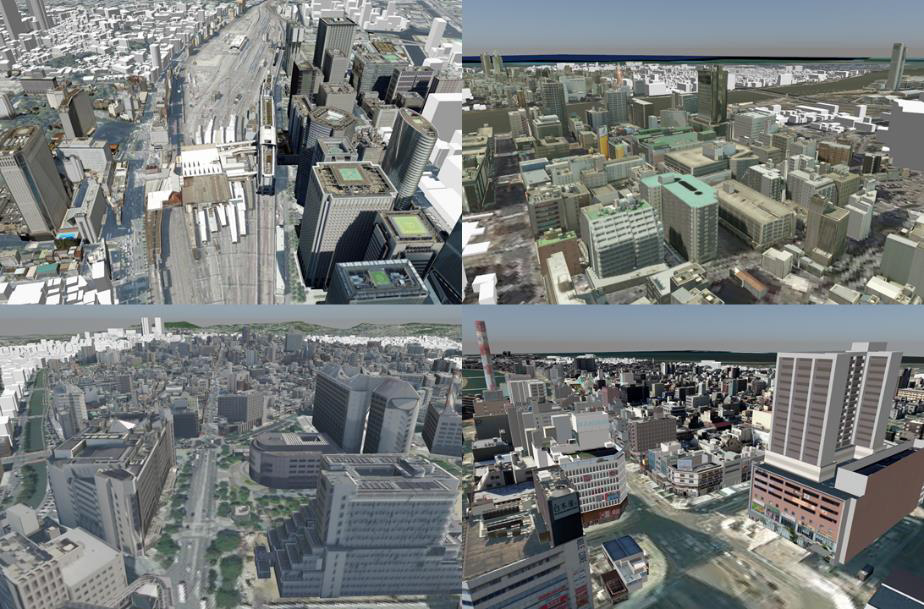
Expansion of CityGML and PLATEAU support UC-win/Road Ver.16 has been equipped with a new function to import city models in CityGML format created in PLATEAU, a 3D city model project promoted by the Ministry of Land, Infrastructure, Transport and Tourism, and to place architecture models on the UC-win/Road environment. Although users can import city model data via FBX and OBJ formats in the past versions, it is now possible to import all PLATEAU city model data directly to UC-win/Road in the CityGML format.
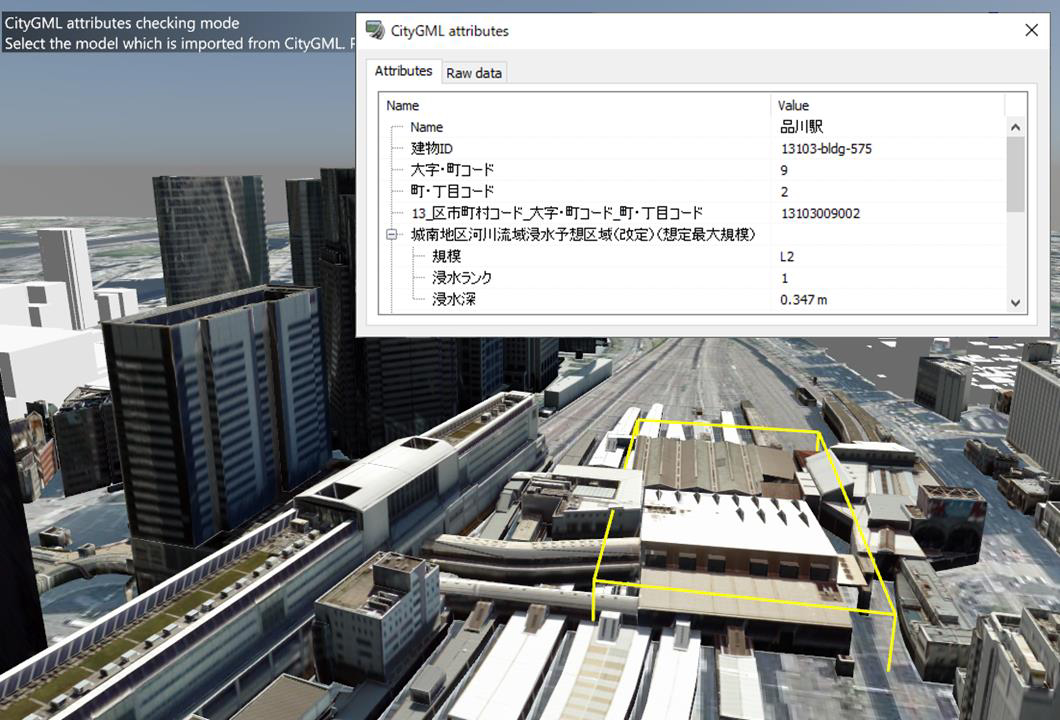
In addition, attribute information of building data included in CityGML files can also be imported to view attribute information included in PLATEAU city model data on UC-win/Road, which could not be viewed by the FBX and OBJ import. It is possible to view basic information of building models as well as prediction of immersion by flooding and tsunami if included.
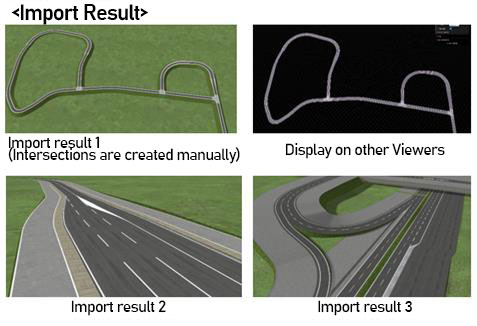
In the future, we will develop functions to cooperate with simulations using shape and attribute data of imported CityGML files, to visualize with attributes, and to re-export simulation result in UC-win/Road to CityGML in order to raise the value of UC-win/Road as digital twin platform. ASAM OpenDRIVE OpenDRIVE® is an international basic standard for high-precision road network for advanced autonomous driving promoted by ASAM (Association for Standardization of Automation and Measuring Systems). UC-win/Road Ver.16 has a function to import ASAM OpenDRIVE® files. The purpose is to reduce cost for creating simulation environments by importing road networks (road, lane) created in external software into UC-win/Road via OpenDRIVE®. Use of high-precision maps is essential for development and verification of ADAS and AD functions in recent years. We will develop export functions for OpenDRIVE® and import functions for high-precision maps towards the further utilization of UC-win/Road to these development and verification.
Expansion of cluster multi-user function Cooperating with the existing multi-user cluster function, it is possible to change scenario transition conditions according to the status of client users. Also, events can be issued to not only main users but also client users. For example, when you constructed a cluster system that simulates driving of 2 drivers and surrounding vehicles in R&D of autonomous driving, ADAS, and traffic safety, the drivers can send messages and voice messages each other to notify dangerous driving behaviors of the other driver. Users can be registered on the edit screen of multi-user in the scenario tab in the ribbon menu. Registered users can be used as a scenario transition condition and an event target. Assign users to each machine on the cluster master screen. Other functions Other improvements and enhancements are as follows: - Environmental map can be reflected by the mirror reflection (Shininess) parameter - CSV import/export of road section: Road sections can be imported and exported in CSV files now in addition to in RS files from the road section list. - The expansion of the edit screen of roadside objects has made the batch update of textures and model data, and sort and data search in list easy. - It is possible to change the weather expressions such as rain, snow, and wind gradually. - Log can be exported in constant time increments. - Keyboard shortcut for navigation can be customized.
 LOADING | |||||||||||||||