
| ●UC-win/Road 自定义开发系统 | UC-win/Road 自定义开发系统 |
●前言
UC-win/Road由详细组件构成,可进行高度或低成本的自定义二次开发。对现有功能的变更和功能追加可通过组件及组件间输入输出的变更和追加实现。现有的组件的重新组合也可实现新的功能。这里将以自定义的基本顺序、自定义开发的案例为中心进行介绍。
| ●组件的变更/追加 驾驶模拟系统 本自定义是以UC-win/Road车辆运动模型的变更、用户硬件的变更及驾驶状况的日志输出为目的的。自定义前的组件构成如下图所示。输入从通常游戏手柄到踏板方向盘的操作量,计算车辆的运动。车辆的加速度和轨道计算由单独的组件完成。 虽然变更了以往的「车辆加速度计算」组件,但车辆引擎运动模型的自定义变为可能。另外,通过变更「车辆轨道的计算」组件,实现了路面与车轮胎之间紧贴模型的吻合。通过追加「模拟踏板装置输入」及「踏板操作输入切换」组件,确保了游戏控制杆与其他硬件的共存,对应了模拟装置。最后通过追加「日志取得与保存」组件,使得取得和保存驾驶模拟相关的信息成为可能。最终的组件构成如右图。 |
 |
|---|
●新组件的开发
通过自定义实现基本技术的独自开发,作为广义应用程序的新功能推进软件的设计和开发。大幅度提高驾驶模拟的行驶脚本功能经过自定义的提供,运用积蓄的经验技术推进开发并作为新功能搭载下一新版本UC-win/Road 3.4。通过脚本功能,可在行驶过程中启动事件,引发驾驶者的反应,设置各类驾驶相关的剧情。计算机图像处理最新技术方面,下期产品VR-Studio中采用了Shaders语言,致力于开发地形的材质处理和光源的高度表现等。这些也将是今后实现独自自定义开发所必要的基本技术。
 |
 |
|
| ▲采用Shaders语言,实现光源的高度表现 | ||
●UC-win/Road演示模拟器
UC-win/Road演示模拟器是作为展示、简易介绍用模拟器而开发的,设计精巧装备有建议方向盘、加速刹车踏板、操作按钮(2个)和17英寸的触碰式面板。筐体内部可防止计算机的机箱,作为唤起车站道路周边安全驾驶的广告宣传用模拟器被广泛采用。
软件部分利用的是UC-win/Road,根据利用目的不同可低成本地自由制作三维驾驶环境。
作为展馆的常设展示、道路设施等的PR用系统是非常经济实用的选择。
 |
 |
|
| ▲UC-win/Road演示模拟器 | ▲正面图片 |
●UC-win/Road驾驶模拟器、运动平台
UC-win/Road驾驶模拟器的功能选项「运动平台」是为了更加真实地体验UC-win/Road的驾驶模拟器而准备的。运动平台受自由度的数量、可承载重量、可再现加速度和反应力、可再现可动范围等影响价格也不同,设定价格高出当前本公司提供的UC-win/Road驾驶模拟器。自由度一般指,斜度(Pitch)、滚转(Roll)、偏斜(Yaw)、摇摆(Sway)、振荡(Surge)、上升(Heave)6个轴的方向。现在,UC-win/Road正在预定运动平台功能选项的开发,适用于所有自由度的插件也在开发予定中。
| 模拟器产品系列 | (PC单卖/硬件保修以产品制造商的规定为准) | ||||||||||||
|
|||||||||||||



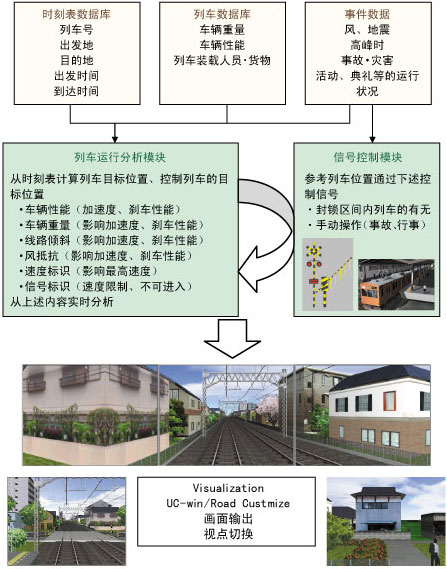
●铁道驾驶模拟器(列车运行模拟器)
 ▲大型铁道模拟器(示意图) |
 |
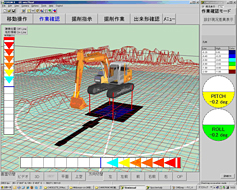
●施工机械远程操作的人机界面
本开发作为2007年度机械化施工中信息化施工研究的一个环节,是受(社)日本建设机械化协会施工技术综合研究所的业务开发委托进行的。在危険区域内的无人化远距离操作中,为确保挖掘精度和挖掘效率,正确并且实时地传递建设机械的作业状况把握问题,良好的操作界面一直是存在的问题,此次在操作人员方面采用UC-win/Road作为界面,通过三维VR实时地确认作业状况传递作业指令,以及操作功能的实装开发和现场试验。
| 1) | 三维信息 (照片、画面) 建设机械搭载的 GPS、地形激光扫描、摄像机装置及其计算机控制系统通过无线LAN发送信息,接收后地形数据以三维地形数据表现,位置信息、建设机械的动作信息可在三维VR空间上通过可动模型实时地表现建设机械模型的真实动作。 |
||
| 2) | 施工阶段的作业指示 本系统的操作流程如下图所示, 移动操作 → 作业确认→ 挖掘指示 → 形状确认 因为操作人员只通过本界面进行各作业阶段的作业指示,配合各阶段的平面、断面、3D显示功能实现可切换显示,使得操作更加简单,构成更加简单易懂。 |
||
| 3) | 横断面表示 挖掘作业中,建设机械和挖掘目标在结合方向的横断面上,对现状地形和设计地形重叠显示,可实时确认现状地形和设计地形的状况。 |
||
| 4) | 得出形状确认 作业开始前将指定设计形状(作业目标形状)和激光扫描计测到的现状形状和平面网格重叠表示,通过高度差异可确认得出形状的数值和层次表示。 |
||
 |
 |
 |
| ▲三维信息 (照片) | ▲三维信息 (画面) |
今后也请在高度多功能的系统开发中利用「UC-win/Road自定义开发系统」。
