|
||||||||||||||||||||
|
|
|||||||||||||||||||




|
Hokkaido University Boasting of Its History of More Than 140 Years, Positioning of Laboratory Though the snowfall seems to be less than the average year, there is a long wall of snow left unmelt on the both sides of the main street around JR Sapporo Station in the beginning of March. Close to the Station is located "Laboratory of (Hagiwara) Advanced Mobility and Transportation Engineering" in Sapporo campus of Hokkaido University, where we visited. The origin of Hokkaido University goes back to Sapporo Agricultural College founded in 1876. After more than 140 years, the Univ. is now organized by 12 Undergraduate Schools (Faculty of Letters, School of Law, School of Science, School of Dental Medicine, Faculty of Engineering/School of Engineering, School of Veterinary Medicine, Faculty of Education/School of Education, School of Economics and Business, School of Medicine, School of Pharmaceutical Sciences and Pharmacy, School of Agriculture, School of Fisheries Science) and 24 Graduate Schools. More than 18,000 students of undergraduate and graduate schools are learning in total (as of April 2018) in 2 campuses of Sapporo and Hakodate that are the base for education and research. Among them, Graduate School of Engineering to which Hagiwara Lab belongs covers 13 Divisions and 37 Research Groups. These Divisions are: Applied Physics, Applied Chemistry, Materials Science and Engineering, Mechanical and Space Engineering, Human Mechanical Systems and Design, Energy and Environmental Systems, Quantum Science and Engineering, Field Engineering for the Environment, Engineering and Policy for Sustainable Environment, Architectural and Structural Design, Human Environmental Systems, Environmental Engineering, and Sustainable Resources Engineering. Divisions of Engineering and Policy for Sustainable Environment is divided into Research Group of Engineering for Sustainable Infrastructure System and Research Group of Policy for Engineering and Environment. Hagiwara Lab. is included in the latter. Expanding from Focus on Driver Behavior to Most Recent Automated Driving Based on researches related to driver behavior and visibility in particular, Hagiwara Lab. is working on research and development contributing to society in the fields ranging from transportation planning to traffic engineering, social / safety system science, and civil engineering. An idea of aiming at preventing traffic accidents from deferent angles is common to all researches of the Lab. Professor Hagiwara's focus on driver behavior dates back to about 30 years when he worked on research related to the driver's gaze point behavior for doctor thesis. Later, he came to study on "what the driver sees and thinks, what kind of actions he takes, and what result occurs", with a focus on "traffic accidents caused by the driver's mistake", which raises a problem in particular. He has been striving for research and development of countermeasures and technologies for drivers not to make mistakes. In recent years, according to him, while efforts on automated driving are progressing, the performance of the vehicle itself is certainly improving, but the main part of controlling a vehicle is gradually shifted from the driver to the machine as well. "This is now what is going to change most. The latest researches tend to be like this (as mentioned at the opening)." It was about 5 years ago when he added automated driving to his research subjects. Since then, for automated driving that is likely to become the main stream more than ever, he has been exploring about "what should be done" from the viewpoint of producing road infrastructure, rather than that of the system side of automated driving, in relation to driver behavior. As his most recent main efforts, Prof. Hagiwara mentions two researches that received grants from "2017 technology research and development contributing to improvement in quality of road policies" by Road Bureau, MLIT. One of them is "Research and development regarding pro-beam road lighting in the urban area" with traffic accident countermeasure as the policy area (research representative: Prof. Hagiwara, research period: 3 years from 2016 to 2018 fiscal year). This focused on a countermeasure to allow the driver to discover a crossing pedestrian earlier in order to prevent accidents of crossing pedestrians on the streets at night. In this research, "Pro-beam road lighting" was developed for streets, which was expected to use to discover crossing pedestrians earlier by radiating light in the direction of the vehicle to cooperate with headlight in lighting. Another is "Research and development regarding new road traffic policies to support production spaces utilizing automated driving and Michinoeki (roadside stations)" that corresponds to a specific issue ("Road infrastructure required to realize an automated driving society") (research representative: Mikiharu Arimura, Associate Professor, Muroran Institute of Technology, research period: 3 years from 2017 to 2019 fiscal year). This focused on "production space" to take charge of agriculture, forestry, fishery, and tourism in Hokkaido, where depopulation makes it difficult to maintain public transportation and commodity distribution. Aiming at the road traffic environment with which people can continue to live in the productive space, research and development is still going on about how the road traffic policies should be including implementation of use of automated driving and Michinoeki. In participating the research, Prof. Hagiwara has adopted UC-win/Road DS. Besides, he also cooperates with groups outside the university, mainly including Hokkaido Regional Development Bureau of MLIT, East Nippon Expressway Co., Ltd. (NEXCO East), Central Nippon Expressway Co., Ltd. (NEXCO Central), West Nippon Expressway Co., Ltd. (NEXCO West), the Nippon Expressway Research Institute Co., Ltd. (NEXCO RI), Honshu-Shikoku Bridge Expressway Co., Ltd. (HSBE). They have been performing joint researches, for example, on what kind of road and tunnel illumination are easy to see at night etc. considering visibility for drivers.
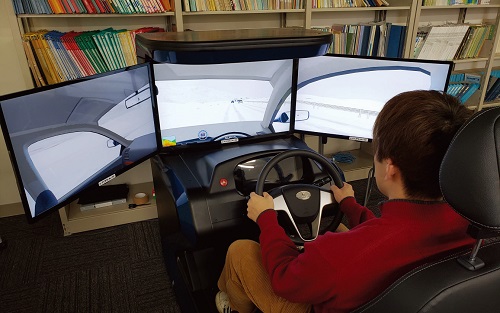
UC-win/Road DS Adopted for Examining Driver Behavior Using ACC in Winter In the research on automated driving Prof. Hagiwara started about 5 years ago, the similar approach was taken as before, measuring driver behavior in the field. On the contrary, in participating the technological research and development granted by Road Bureau, MLIT, "Research and development regarding new road traffic policies to support production spaces utilizing automated driving and Michinoeki (roadside stations)" which was launched in fiscal 2017, it was assumed to utilize VR technology. As the aim of this, he mentions 2 points: 1) When the actual vehicle travels in the fields, it is impossible to set the same experimental conditions every time. On the contrary, as the reproducibility of experimental conditions and automated driving is high with VR, it is possible to make comparison under the same conditions; 2) Even if there is a situation in which a collision occurs in VR, realistic danger does not accompany it. "(In this research) we tried to deal with winter (i.e. perform experiments in the road environment of the winter season, when there are not a few factors that makes driving difficult, for example, frozen road surface and poor visibility). Thus, we decided to utilize VR because it was hard to create the same condition every time, for example, "slipping on the road surface" (in the field).
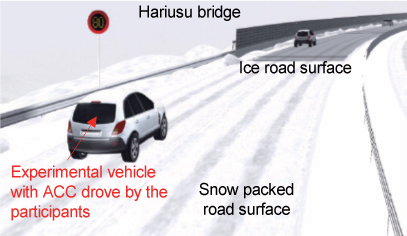
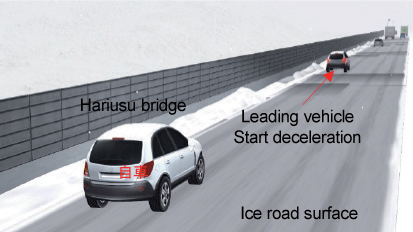
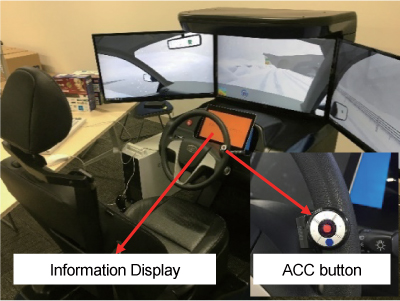
Firstly, regarding the operation of the automated driving system in the road environment in the winter season, Prof. Hagiwara set the role of side of road as "communicating risk events undetectable by the sensing system of the automated driving system such as road surface or visibility conditions ahead to the automated driving system". This research examines "provision of information for the drivers who are using Adaptive Cruise Control (ACC) on expressways in the winter season to avoid in advance the risks caused by slippery road surface (low-μ road) ahead". Then he measured the difference between 1) driving after providing the driver with information about low-μ road ahead, and 2) driving after providing the driver with not only information about low-μ road ahead but also measures to deal with it. Experiments using DS were incorporated since it was impossible to reproduce such situations on actual roads. In the first fiscal year of the 3 years of research period (fiscal 2017), 48 students of the Univ. took part in the research and conducted the experiments above. On the other hand, the results of the field experiments of another project that they worked on separately showed that the influence of not only the slipping on the road surface but also the road alignment was substantial. Therefore, in the second year (fiscal 2018), situations were changed to some extent from the previous fiscal year, and elements of road alignment were added to the design. 32 students took part in it and conducted experiments similarly.
Final Year of Research and Utilization of VR in the Future "It was easy to reproduce a road with VR using UC-win/Road. It took only a short time to create a road close to the actual road." To prepare VR used in the experiments, the Lab created the terrain data to be experimental environment, using UC-win/Road. FORUM8 staff provided support at any time by modifying the scenario a little or customize the function that was lacking in UC-win/Road. Then the Univ. made final adjustment of the experimental scenario. Through such process, he realized not only the advantage of UC-win/Road, of which "very useful in large part", but also its problems. Based on them, Prof. Hagiwara is planning to repeat experiments in the final fiscal year (fiscal 2019) using VR similarly to the previous fiscal year, changing the automated driving system a little. "(In this research) we are using VR in order to understand the interaction between automated driving and the driver. Based on them, we would like to lead to the future, for example, develop better interface for automated driving, or improving the road so that drivers won't make errors." |
|||||||||||||||||||||||||||||||||
| (Written by Takashi Ikeno) (Up&Coming '19 Spring issue) |
|||||||||||||||||||||||||||||||||

|
||||

