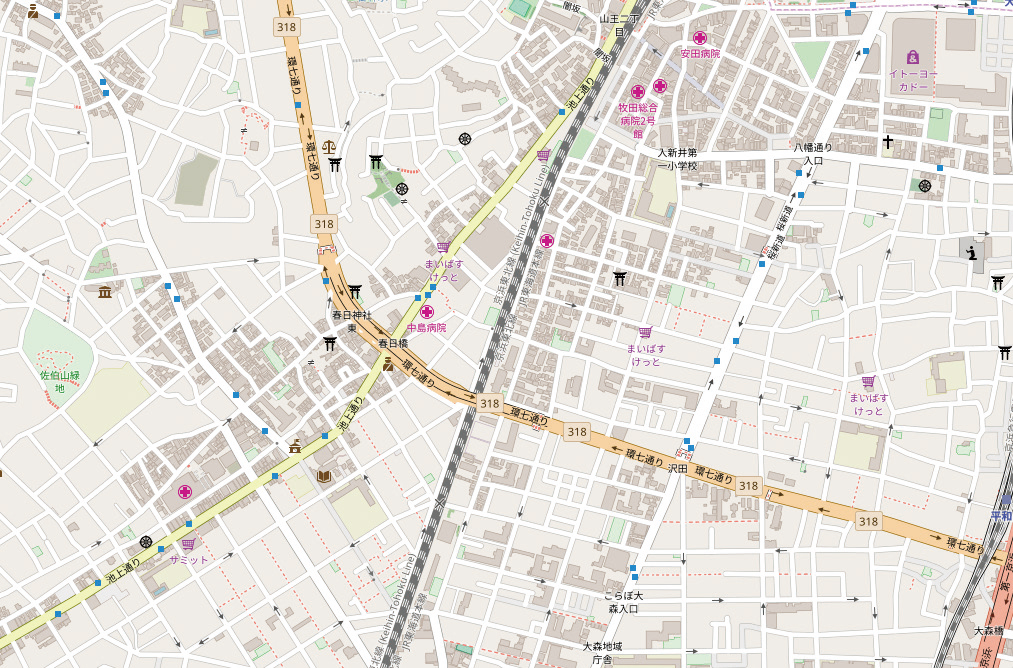
OpenStreetMap是为了构建免费开放的地图信息资源而进行的网上协作计划,由全世界的志愿者共同开发制作。制作完成的地图不仅可 以在浏览器或网页自由使用,还可以将数据用于商用目的。
地理院地图是由国土地理院提供的地图信息资源。遵守与国土地理院签署的内容使用协议,可以获得高精准度的地图信息。
读取互联网地图信息的操作顺序如下。首先,定义想要下载地图信息的区域,其次在定好的区域编辑画面点击读取,接下来系统会自动读取信息并生 成建筑物或森林。
 |
 |
| 图1 OpenStreetMap的地图信息 | 图2 读取OpenStreetMap的效果 |
如果地图信息中包含高度,则会利用高度生成对象。反之如果不包含高度,会应用默认高度。生成对象后,可以开始编辑生成的建筑物或树林。
| 编辑可指定单个模型完成,或者指定整个建筑物・森林来进行编辑。
根据从地图信息资源下载的地图情报,可能会生成需要以上的对象,因此可以选择是否每个建筑物或森林生成对象。 对于互联网地图信息读取功能,我们正在开发除了OpenStreetMap和地理院地图意外的互联网地图资源来兼容UC- Win/Road。如果您有想要使用的数据库,请咨询我们。 |
|