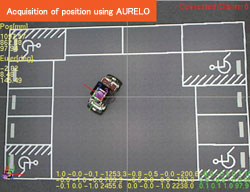
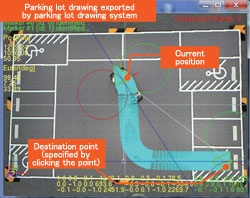
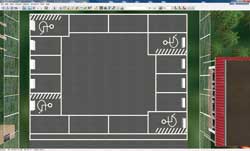
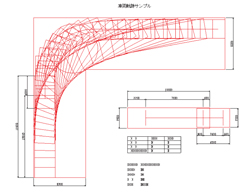
Vehicle Trajectory Drawing System, one of our products in UC-1 series of products, can calculate and draw a vehicle trajectory based on a drawing theory such as the one from "Design of vehicle trajectory of the semi and full-trailer turning at right angle (JASO Z 006-92), Society of Automotive Engineers of Japan, Inc." so that you can do driving simulation on an assumed path or existing path and the vehicle trajectory can be created effectively (Figure 1, 2). It is possible to design the parking lot while checking if there would be any problem to park into each space by linking the created drawing with our UC-1 series product, Parking Lot Drawing System (Figure 3, 4). This drawing of parking lot can be imported into UC-win/Road to create the parking lot in VR space. Moreover, the drawing can be printed out to use as a site where RoboCar(R) can run on for the simulation.
 |
 |
- Setting of registration of vehicle |
|
 |
 |
- arrange parking spaces all at once |
and Vehicle Trajectory CAD |