
UC-win/Road Customize System : Mobile Mapping System
UC-win/Road Point Cloud Modeling Plugin
Initial Release : 2010.09.21
- USD1,730
Related products & Services
UC-win/Road 3D Laser Scanning and Modeling Service
Program Overview
As one of the applications of 3D information in surveying and construction field, 3D modeling of point cloud data, which is surveyed on site by using high accuracy GPS-based mobile measuring device, is drawing attention.
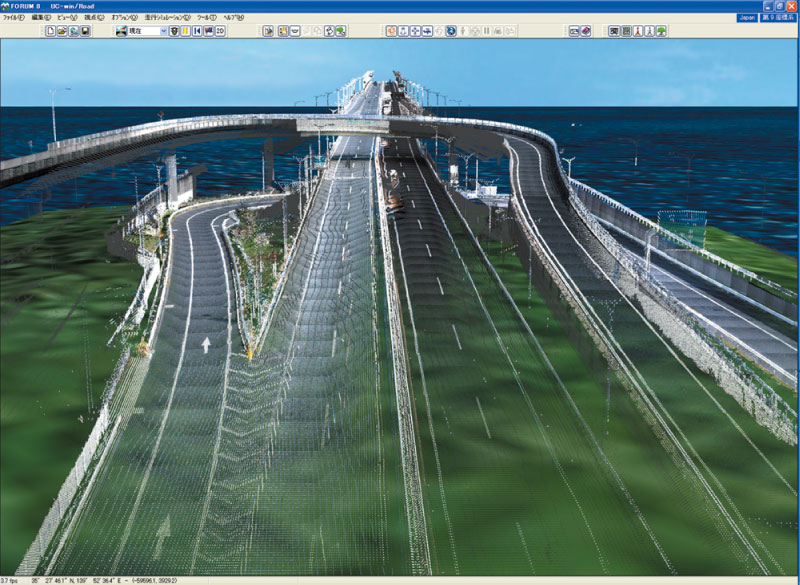
In a FORUM8-conducted sample project, we used the data from Umi-hotaru (sea firefly) parking area along the Tokyo Bay Aqua Line Expressway measured using Mitsubishi Mobile Mapping System (MMS).

▲ Intersection of Shibuya
Functions and Features
■VR modeling by using point cloud data for UC-win/Road
■Developing customized functions of VR modeling with point cloud data
Functions and Features
-
- UC-win/Road Utilization of point cloud data as reference data to create roads
You can use it as an after-MMS processing tool or VR modeling tool to integrate with mobile mapping systems. - Utilization of point cloud data as a reverse analysis tool for UC-win/Road・VR model
We propose the use of point cloud data to check VR models. For example, it can be used to guarantee the accuracy of the data and maintenance: gap analysis because of aging. - Data file : An excel file which has 17,000,000 coordinates.
- File format : X coordinate, Y coordinate, Z coordinate(Height), R, G, B
- Research and design: Understanding the point cloud data and selecting the program
- Segmentation and positioning of the road and making the road section. Reference by VR Mesh Reverse and acquire the information.
- At the time of creating building models, use the point cloud data for model positioning and making, and measure the accurate structures
- VR data adjustment on UC-win/RoadVR , learn how to use the point cloud and how to create the road data.
- Accurately measure objects and roads in full 3D
- Makes it easier to understand the project
- The perfect way to validate data
- Use in conjunction with CAD and Google Earth Measurement
- More time consuming
- Extra training may be necessary
- PC with larger capacity may be required
- Data of original file format
- File format : X coordinate, Y coordinate, Z coordinate(Height), R, G, B
- Open the file by Wordpad(Notepad can not open the Excel file because of data capacity
- Save the file as .txt file.
- Use GSplit to divide the text to 1,000,000pieces.
GSplit(free soft) http://www.gdgsoft.com/gsplit/
Utilization of point cloud data by mobile mapping
● Sample project
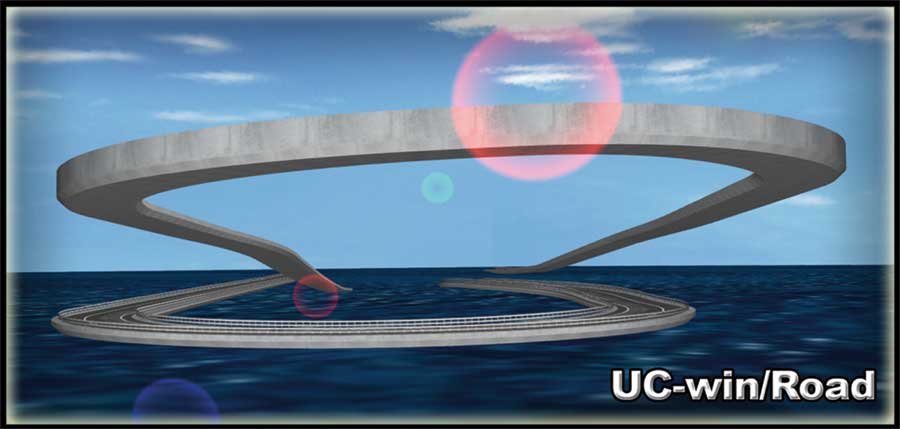
Outline of making sample data, "Umi-Hotaru" on Tokyo Bay Aqua Line
Sample point cloud data of Umi-Hotaru parking area on the toll road crossing Tokyo Bay has very complicated features and is a good sample to understand the difficulty and merits of point cloud data as a reference tool. Sample data consists of complicated structures like flyover ramps, a tunnel, a bridges and a parking space.
We created VR models with UC-win/Road in a short time after adjusting with a general modeling tool to some extent.
● Project process in detail
●Advantage and disadvantage using point cloud data
Advantage
Disadvantage
●Data format and how to use it
●File conversion process
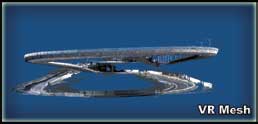
●Overview and how to use VR Mesh Reverse
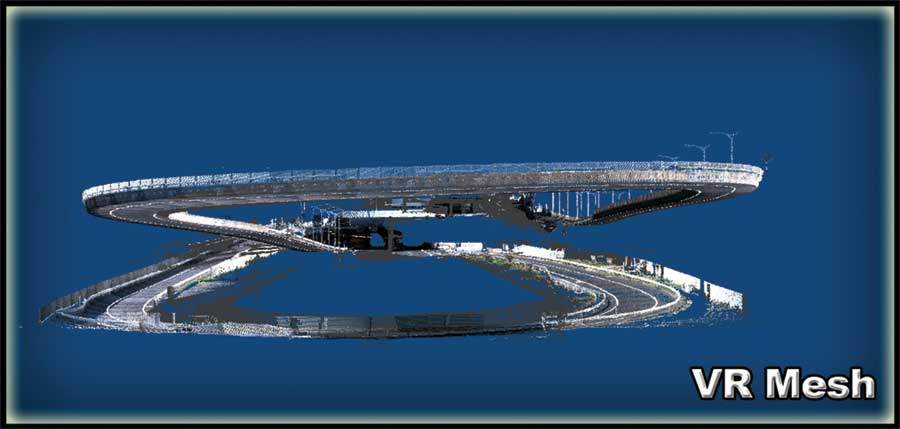
In the Umi Hotaru project, each 17 text files finally has 1,000,000 coordinates including R, G, B values. VR Mesh Reverse is the program the data can be used.
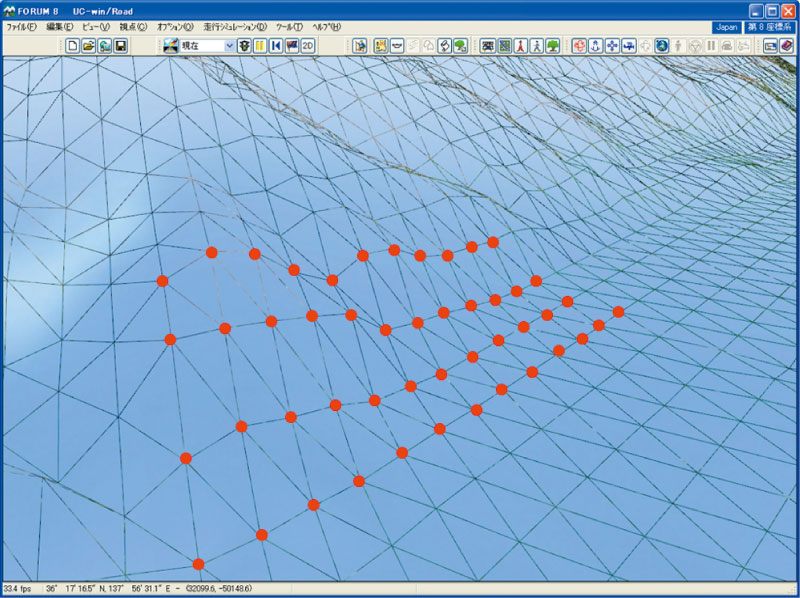
The significant merit of VR Mesh Reverse is that users can manipulate and execute millions of coordinates data by special LOD functions.
VR Mesh Reverse enables users measure the basic items such as road design and allocation of objects with high accuracy. VR Mesh Reverse individualizes the necessary range for high PC performance. In addition, with the high capability of VR Mesh Reverse that can handle 17,000,000 coordinates simultaneously, users can understand the way data is to be created by seeing data as point cloud.
●Work items and required time frame (Umi-Hotaru project)
Work time Required date Note 1. Research and design 5 days Research and design includes research for the software used.
Research is conducted by FORUM8.2. Segment of the Road and allocation 3 days 3. Building model 1 day 4. Adjusting the VR data 2 days - UC-win/Road Utilization of point cloud data as reference data to create roads
UC-win/Road Point Cloud Modeling Plugin
-
As well as the import of point cloud data, Point Cloud Data Plug-in option has many more features. This option enables you to import point cloud data obtained using surveying tools, such as laser scanner, into the 3D VR software and display the imported data at a specified position.
To convert the terrain data, TIN data is generated from the laser-scanned point cloud data and then terrain patch function can be used to model the terrain.
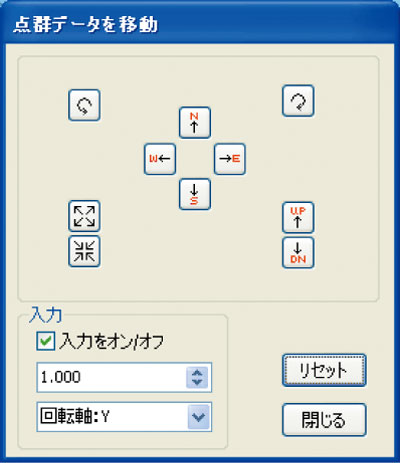
Repositioning of the point cloud data is possible by moving the point clouds sideways or rotating them.
For exporting data, you can export point cloud data to Land XML data, so that the generated data can be used on other systems.
▲Point cloud data import

▲Import and drawing of point cloud data
▲Point cloud drawing option
▲Generation of terrain TIN data, terrain modeling

▲Position adjustment of
point cloud data
VR mesh function overview
-
VR Mesh Function which is indispensable for using millions of point cloud data.
VR Mesh Reverse : Price $695.00US Virtual Grid (http://www.vrmesh.com/products/reverse.asp)
▲LOD function using 17,000,000point cloud data
▲Expresses one part by Window Clip
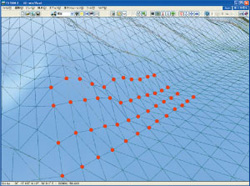
▲Measuring point cloud data information by using the UC-won/Road data creation functions.
By selecting "Analyze", measurement begins.
Later, select Measure Distance and click 2 point clouds of the data to measure the distance.
By retaining the previous measurement, users can measure the point clouds.
However, it takes sometime to get accustomed to, because the tool to assess the different coordinate planes.
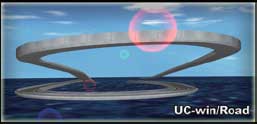
Overview of the UC-win/Road model by point cloud data
-
- Utilization of Point cloud data as reference data to create road on UC-win/Road
You can use it as an after-MMS processing tool or VR modeling tool to integrate with mobile mapping systems - Utilization of point cloud data as a reverse and difference analysis tool for UC-win/Road
VR model and as a checking tool for VR models. For example, it can be used to guarantee the accuracy of the data and maintenance: gap analysis because of aging. We will propose the solution to meet your request and needs.
Conducted the road alignment and definition of the section, referring to the point cloud data. Finished VR model will be a highly accurate structure model. It can be used for It can be used with generated traffic, as a VR model which is used in the event of presentations and discussion.
▲Definition of road alignment
▲Definition of vertical alignment
▲Definition of section

▲Road is generated in a moment. (initial model)
Generating traffic, users can simulate it at once.
▲Data with added buildings and road belongings


We recommend...
- Utilization of Point cloud data as reference data to create road on UC-win/Road




Mitsubishi Mobile Mapping System
-
- An integrated unit of 3 GPS antennas, IMU, camera and laser scanner is equipped on the top board. Since the equipment is adjusted in factory, eliminating the need of a complex vehicle outfit. 3 DPS's deployed in triangular shape capture position of the vehicle precisely.
- Newly developed sensor box gives the time to retrieved data with 100usec resolution. The accuracy of data collection does not decline in case of high speed drive. BOX camera up to five units and laser scanner up to five can be connected.
- Making road map of present condition as the attached map of the road register
- Editing point cloud to CAD data for management before and after construction
- Creation of basic data for creating 3D map
- Check the adjacent roads
- You can identify the location of pedestrian crossings and surface markers as well as three-dimensional objects such as signs, utility poles, traffic signals and curbs by using photos.
What is Mitsubishi Mobile Mapping System - High accuracy GPS mobile measurement system -
Mitsubishi Electric's Mitsubishi Mobile Mapping System: High accuracy GPS mobile measurement system
https://www.mitsubishielectric.co.jp/mms/
for survey

for making maps

for road maintenance
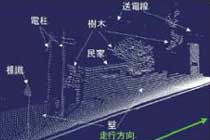
▼Measuring the position of the object with laser scanners and cameras, precise 3-dimensional map in urban areas is easily created.

Price
Product Price
-
Click here for the price of UC-win/Road
■Product Price
Product
Product Configuration
Price
UC-win/Road Ultimate UC-win/Road
+
including all pluginsUSD17,200 UC-win/Road Advanced UC-win/Road
+
Point Cloud Modeling Plugin
and other pluginsUSD8,800 UC-win/Road Point Cloud Modeling Plugin Plugin only USD1,730 ■Price of Floating License
Paying 40% of the product price allows anyone to use the product on any PC anywhere in the world.
Product
Price
UC-win/Road Ultimate USD6,880 UC-win/Road Advanced USD3,520 UC-win/Road Point Cloud Modeling Plugin USD692
Price of Subscription Service Contract
Price of Subscription Service Contract
-
■Support information
-Software upgrade -Technical inquiry (Email, Tel)
-Download service -Maintenance and update notifications via email
* We are sequentially making a transition from the maintenance-support service to [Subscription Service] from April 1, 2016 in order to enhance support for diverse product usage and to reduce license management cost.
Product Subscription cost
of first yearSubscription cost
of subsequent years
(annual cost)Subscription (UC-win/Road Point Cloud Modeling Plugin) Free USD692 Subscription (UC-win/Road Point Cloud Modeling Plugin Floating) USD968
Price of Rental License / Floating License
■Rental license : Short term licenses available at a low price
■Rental floating license : After web activation, anyone can use the products on any PC anywhere in the world.
■Rental access : You can increase the number of licenses you own and use these additional licenses for a specific period of time (1 month to 3 month) at your discretion. We will later send you an invoice based on your usage log. The advance application is 15% off of the regular rental license price. Please place an order from User information page.
*Rental / Floating Licenses were introduced on September 2007 to enhance user experience and convenience of our products.
*Duration of Rental / Floating Licenses cannot be changed after starting these services. Re-application is required to extend the rental and floating license duration.
Rental license / Rental floating license
-
■Rental License
Product 2 month 3 month 6 month UC-win/Road Point Cloud Modeling Plugin USD778 USD916 USD1,124 ■Rental Floating License
Product 2 month 3 month 6 month UC-win/Road Point Cloud Modeling Plugin USD1,297 USD1,539 USD1,903 Order / Contact Us
Order / Contact Us
-
Inquiries about UC-win/Road: road@forum8.co.jp
Order
Contact us from Sales inquiry or email to ist@forum8.co.jp


LOADING