司机的视觉盲点,比如从路边巴士的死角突然飞奔出来的步行者这一危险的状况为例。设定以50Km/h走行的车辆,在距离飞奔出的步行者 所在点还有40m的时刻,步行者开始奔出(图1)。
 ■图1 想定内的行动 |
在车正好以50Km/h走行的情况下,如预想的时机步行者会飞奔出撞上。假设车是以30Km/h或者是80Km/h,都会错过步行者, 从而不会发生撞击(图2,图3)。
 ■图2 时速30km/h的情况 |
 ■图3 时速80km/h的情况 |
这是因为,自车从步行者出现起到发生撞击为止的时间根据车速发生变化。根据驾驶员的状况造成事故存在一定概率,所以并不能确定这是个理 想的设定。作为解决方案, 可以将撞击事件的发生时间设定为到达时间。这种到达时间的设定,将车辆在整个过程中的速度因素割离出,在和距离因素无关的条件下模拟出事故。
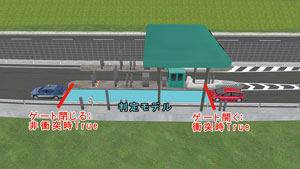
 ■图4 设定到达时间 |