건설 로봇용 3차원 정보 표시 기술로의 활용,
확대되는 3차원 실시간 VR의 새로운 가능성
금회에는 후지산 기슭의 후지시에 위치하고, 15만 ㎡의 광대한 부지에 대규모인 동시에 다양한 시험 시설등이 있는, 사단 법인 일본건설 기계화 협회의 부속 기관 「시공 기술 종합 연구소」를 소개합니다.
포럼8의 「UC-win/Road」를 도입 하게 된 계기로서, 동연구소의 광범하게 미치는 업무내에서도, 정보 통신 기술 (IT)이나 로봇 기술을 기초로 새로운 시공 시스템의 개발을 목표로 하자고 하는 프로젝트 대응에 있으며. 특히, 사람과 건설 로봇이 협조해서 작업을 할 때의 인터페이스를 어떻게 하면 될 것인가라는 연구로서, 정보를 3차원적으로 시각화 하는 툴로서 주목되었다 것에 있습니다. 거기서, 동프로젝트와 아울러, 정보화 시공에 관한 여러가지 대처를 통괄하고 계시는, 동연구소 연구 제 4부 차장의 아게이시슈지씨에게 말씀을 부탁하였습니다.
| ■주로 공적 기관으로 부터 위탁을 통하여 다양한 연구 개발을 실시 |
건설 사업의 기계화 촉진을 통하여, 국토의 개발과 경제의 발전에 기여하는 것을 목적으로 , 50년에 발족한 「사단 법인 일본건설 기계화 협회」.「시공 기술 종합 연구소」는 그 중에서, 건설 기계 및 기계화 시공 전반에 관계되는 시험 연구를 실시하고, 건설 기계 기술 향상이나 건설 사업의 합리화를 타겟으로 하는 연구 기관으로서 64년에 설립 (당초는 「건설 기계화 연구소」,02년에 개칭)되었습니다.
이외에 아무것도 없는 웅대한 후지산의 대파노라마.이 웅장한 자연환경속 연구 거점 (동서 450 m•남북 350 m의 지역)에는, 1주 750 m의 테스트, 음향 파워 레벨 측정장, 골재 파쇄 시험 설비, 대형 피로 시험기를 시작으로 각종 시험기•시험장- 등 다채로운 옥내•옥외 시설을 설치. 모두해서, 직원 74명 (근일, 사무 직원 14명, 토목•기계•자원•지질•전기계 기술 직원 60명: 04년 11월 현재)를 배치.토공, 암석공, 콘크리트공, 터널공, 기초공, 댐공, 교량공의 건설 공사 전반에 걸치는 기계화 시공법이나 건설 기계에 관한 조사 연구, 개발, 시험 연구, 기술 지도등이 실시되고 있습니다.
협회가 국내의 주된 건설 기계 메이커나 그 유저인 건설 업자들을 중심으로 구성되어 있는 면도 있으며, 동연구소에서는 기본적으로 국토 교통성이나 지방 공공단체, 각종 인프라 정비 발주 기관으로 부터의 위탁을 받는 형태로 사회적 혹은 업계 공통의 니즈에 기인해서 이 업무를 진행하고 있습니다.
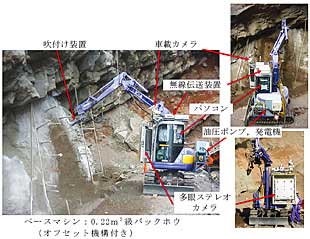
이시 슈지씨는 이러한 측면을 나타내는 특징적인 개발 사례로서 , 「무인화 시공 기술 (분사로봇)」을 이야기합니다.이것은, 후지산 서쪽의 산정부터 중턱에 걸쳐 토사가 계속 발생하는 「붕괴」에 대해, 나라의 직할 사방 사업이 69년부터, 그 발생원(원두역)의 조사 공사를 82년부터 개시하였다. 특히 원두역은 험난할뿐만 아니라 협소하며, 고표고의 위험 개소가 있는 상태에서, 경관이나 환경 배려도 고려되어 요청되는 등, 국교성 후지 사방 사무소의 위탁에 의해서 동연구소가 98년 이후, 안전을 확보하면서 난제를 클리어하는 수법으로서 「무인화 시공 기술」의 개발•도입을 진행시켜 온 것이다. 그 결과, 무너지기 쉬운 스코리아(scoria)층으로의 분사는 물론, 다안 스테리어 카메라를 이용한 거리 측정 장치등에 의해서 분사두께의 분포와 경사의 형태까지도 원격 조작으로 관리하는 것이 가능하게 되었습니다.
「또 하나, 조금 다른 종류이지만 [비행선에 의한 실드 터널 감시 시스템]이 있습니다」
이것은, 비행선이 실드 터널내에 부딪치지 않도록 주행 하면서 주변의 영상을 기록 하는 점검 시스템입니다.원래 사람이 목시에 의해서 점검 할 수밖에 없었던 실드 터널의 유지 관리를 시스템화 하자고 한 것으로, 동연구소가 04년도에 개발, 운용을 시행하고 있습니다.
| ■정보화 시공은 비전 검토부터 각 요령 (안)책정, 국제표준화기구화까지 관여 |
「일련의 건설 사업 프로세스에 걸쳐서 정보를 활용하는 것으로, 특히 시공 프로세스에 있어서 편익을 상정, 그것을 위한 여러가지 애플리케이션에 대하여 검토를 행하여 오고 있습니다」
아게이시 슈지씨는 자신이 관계되는 주요 업무의 하나로서, 「정보화 시공」에 대한 대처를 이렇게 설명합니다.
국교성이 01년 3월에 책정한 이래, 정보화 시공의 구체화된 베이스로 위치가 부여되고 온 「정보화 시공의 비전」. 그 내용은, 애당초 국교성이 97년도부터 「정보화 시공 촉진 검토 위원회 (위원장: 오오바야시 시게유키 전 동경 이과 대학 교수 )」가 진행시켜 온 검토에 기인하고 있습니다.동연구소는 그 사무국의 일단을 짊어지고 있고, 말하자면, 정보화 시공의 스타트시부터 관계되어 오게 된 것입니다.
우선, 국교성에 의해 정보화 시공의 제1탄으로서 03년 12월에 책정된 것이 「TS-GPS를 이용한 성토의 탬핑 정보화 시공 관리 요령 (안 )」. 이것은, 토탈스테이션(TS)이나 GPS(범 지구 측위 시스템)을 사용하여 실시간으로 탬핑 기계의 위치를 측정하는 것으로, 성토면의 탬핑 회수를 파악, 동시에 성토의 품질 관리를 면적에 행할 수 있다는 것이다. 계속해서 현재는, (1)형관리에 필요한 설계 정보나 형정보를 3차원 데이터화하고, TS에서 나오는 형의 3차원 좌표 데이터를 취득해서 전용 프로그램에 의한 시공 관리나 장표 관리를 행하고자 하는 「TS를 이용한 형관리요령 (안 )」 (2) 3차원 설계 데이터로 직접 중기를 제어하고, 아울러 탬핑 기계의 작업 위치를 연속 관리하면서 TS에 의한 3차원 측량 데이터로 나오는 형을 측정하는 「포장공의 정보화 시공 요령 (안 )」 ― 등의 내년도 책정을 목표로 한 움직임을 볼 수 있습니다.
이것들에 대해서도, 동연구소에서는 국교성이 주도하는 각 지정이나 동성 국토 기술 정책 종합 연구소 (국종연 ), 독립 행정법인 토목 연구소 (토연)등과 연계하면서, 사전 시공 실험이나 요령 (안)에 기초를 둔 시행 공사에 전념해 오고 있습니다.
정보화 시공의 도입이 차차로 여러가지 현장으로 퍼지는 것과 병행하여, 각각의 시스템에서 취급되는 데이터 교환의 표준화도 필요하게 되었습니다. 현재, 데이터 포맷의ISO화가 진행되고 있으며, 아게이시 슈지씨 자신도 위원으로서 참가. 특히「ISO /TC/127 /WG2(토목 기계 및 주행식 도로건설 기계 - 시공 현장 정보 교환 )」에 있어서는 현재, 일본이 정보 모델이나 데이터 사전의 작성등에 있어서 주도적인 역활을 하고 있습니다.
| ■건설 로봇은 3차원 정보의 취급, 사람과의 인터페이스가 열쇠. |
연구소내에서 아게이시 슈지씨가 통괄하는 또 하나의 테마가 건설 로봇의 연구입니다.이것에 대해서는,국종합연구소에 의한「3차원 정보를 이용한 시공 관리 기술의 개발」과, 토연에 의한「건설 기계의 IT 시공 기술의 개발」이라고 하는 동시 진행중인 각각의 프로젝트가 대처의 핵이 되고 있습니다.
여기에서 전자는, 시공 관리에 관한 정보가 3차원 CAD 데이터 또는 프로덕트 모델로 취급되는 장래를 상정. 금년도까지의 예정으로, 3차원 정보의 계측•관리와 그 활용 기술의 단면에서 「어떤 모델로 현장에 넘겨주고, 그 결과를 어떻게 평가하는가?」의 검토와 맞물려, 국종합연구소가 중심이 되어 제안된 토공의 표준적인 모델을 기초로 실증 실험이 행하여 지고 있습니다.
동연구소는 그 중에서, 특히 모델 및 그 베이스가 되는 정보 이용 부분의 정리, 실증 실험, 새롭게 필요되는 시공 관리 기준의 검토등에 힘을 기울이고 있습니다.
한편, 후자는 건설 로봇의 자리매김을, 단지 자동화하는 기계로서가 아닌, 다양한 정보이용이 가능한 환경에서 작업하는 것으로 파악하고 있고, 아게이시 슈지씨 자신처럼 지향 해 나갈 필요가 있다고 보고 있습니다.
거기서 우선, 실시간 시공 상황을 3차원 정보로서 계측하는 것을 목적으로, 로봇에 필요되는 외계 센서의 기능면에서부터 레이저 시스템과 스테레오 처리에 관한 시스템 개발에 노력하고 있습니다.
또한, 「사람과 건설 로봇이 어떻게 협조해서 작업 해 나갈것인가?」라고 하는 인터페이스가 상당히 중요한 관점에서, 07년도까지의 5년에 걸친 프로젝트에서도 그 검토가 진행되고 있습니다. 그 한가지 실제 예가 「3차원의 오퍼레이터 지원 뷰어」의 연구입니다. 이것은 3차원 CAD 데이터에서 작성되는 건설 로봇의 시공 목표와 외계 센서에서 얻어지는 정보를 비교. 아울러, 오퍼레이터와도 대화할 수 있는 시스템을 상정. 특히 거기에서의, 3차원 CAD 데이터와 현지의 형상, 혹은 영상등을 어떻게 처리하여, 오퍼레이터에게 정보로서 주고 받을 수 있는가에 대하여, 「UC-win/Road」를 베이스로 한 검토가 계속되고 있는 이유입니다.
「다발하는 자연 재해에 대하여, 소형 비행체등에 의해 취득한 정보에서 피해 상황을 어떻게 조기 파악할까? 라는 내용이, 연구소의 새로운 검토 과제로 위치를 자리매김 해 오고 있습니다」
거기서도, 사람이 목시에 의해서 판단 해 온 부분에 IT를 도입 하자고 하는 종래의 접근을 시공부터 유지 관리로 넓혀 가는것으로, 정보의 새로운 활용 가능성과 연결되는것이라고 생각됩니다.
또한, 무인화 시공 기술은 원래부터 재해 복구 장면에 응용할 수 있는 가능성이 높다. 그 때문에, 아게이시 슈지씨는 그러한 대응을 도모할 때에도, 지금까지의 대처 발전형이 되는 새로운 건설 로봇에 대한 견해가 필요합니다.
바쁘신 중에도 불구하고, 취재에 응해 주신 관계자 여러분께 깊은 감사의 말씀을 드립니다.
 |
|
 |
|
 아게이시 슈지 차장 |
 |
 |
|
 |
|
 |
|
 |
|
 |
|
 |
 |
|
| LIST | NEXT |