Using UC-win/Road, JCMMRI Was Able to Address 3-D Display Technology of Information for Construction Robot, Expanding Availability of 3-D Real-time VR
This article introduces Japan Construction Method and Machinery Research Institute (JCMMRI), an affiliated organization of Japan Construction Mechanization Association (JCMA). Located in Fuji City at the foot of Mt. Fuji, it has a site as large as 150,000m2 with large-scale and diversified testing facilities and others.
JCMMRI chose FORUM8's UC-win/Road to address a project of developing a new construction system based on information technology (IT) and robot technology, among wide diversity of JCMMRI's activities. UC-win/Road was outstanding as a tool to visualize information in a 3-D form, especially for the research on interface for collaboration of human beings and construction robots. We interviewed Mr. Shuji Ageishi, Deputy Manager of Fourth Research Division, JCMMRI, who is leading various projects relating to intelligent construction including this one.
In 1950, Japan Construction Mechanization Association (JCMA) was founded to contribute to the nation's land and economic development by promoting mechanization of the construction industries. In 1964, JCMMRI was founded (originally named as Construction Mechanization Research Institute and renamed as it is now in 2002) as a research institute affiliated with JCMA to carry out researches and tests into the areas related with construction machinery and mechanized construction works, aimed at promoting technology improvement and rationalization of construction projects.
JCMMRI is blessed with a wonderful environment with a scenic unobstructed view of Mt. Fuji. Inside its site of 450m (east-west) by 350m (north-south) in length, diversified indoor and outdoor facilities are located including Test Course with a 750m-longcircuit, Sound Power Level Measuring Field, Aggregate Production Plant, Large Scale Fatigue Testing Machine and other testing machines and field. 74 staff members are working, 14 of those are office workers and 60 are technical workers on civil engineering, machinery, resource, geology, and electricity, as of November 2004. In these facilities are carried out researches, development, testing, and technical consultations on mechanized construction method and construction machinery for all areas of construction works such as of earth, rock, concrete, tunnels, foundation, dams, and bridges.
As JCMA is composed of the nation's leading manufacturers of construction machinery and their users, namely, contractors, JCMMRI basically performs the activities commissioned by Ministry of Land Infrastructure and Transport (MLIT), local governments, and other clients of infrastructure development agencies, in accordance with the social needs or common needs within the industry.
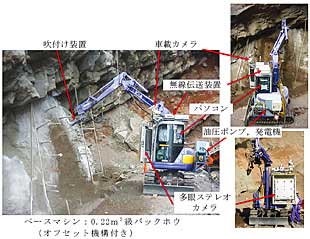
An example of development that highlights as above is referred to by Mr. Shuji Ageishi as an "unattended construction method (spraying robot)". In order to address "Osawa Landslide," or a continuous sediment flow from the crest on the west side of Mt. Fuji towards its hillside, erosion and sediment control (Sabo) projects executed by the national government started from 1969, and research works in the origin area (headwaters) were initiated in 1982. Special attention was needed because the headwaters area was not only a critical location, being steep, narrow, and of high altitude, but also a place requiring consideration for landscape and environment. To overcome these challenges and secure safety, the above "unattended construction method" has been developed and introduced by JCMMRI since 1998 as a contract work commissioned by Sabo Works at Mt. Fuji. MLIT. Consequently, it enabled spraying on scoria stratum that is apt to break down, as well as remote control of spray thickness and gradient work progress with a distance measuring equipment using a multiple-lens stereo camera.
"There is another unique example of 'shield tunnel monitoring system with airship'," says Mr. Ageishi.
This is an inspection system that records images of the surrounding area while running without clashing inside the shield tunnel. Originally, maintenance of shield tunnels was only possible by man's visual inspection, and this is an attempt to systematize it. The system was developed by JCMMRI in 2004 fiscal year, and its trial operation has been carried out.
"We assume the benefits brought about by utilizing information through the sequential processes of a construction project, especially in a construction process," explains Mr. Shuji Ageishi about his approach towards "intelligent construction," one of his main works.
'Visions of Intelligent Construction' have been positioned as a basis for realizing intelligent construction since they were formulated by MLIT in March 2001. Their contents are based on the examination carried on by Committee for Examining Promotion of Computerized Construction (chairman: Nariyuki Obayashi, professor at Science University of Tokyo). JCMMRI is supporting its secretariat, so it follows that JCMMRI has been involved with intelligent (computerized) construction from its starting point.
'Procedure Plan for Intelligent Construction Management of Embankment Compaction Using TS-GPS' was formulated by MLIT in December 2003 as the first step for intelligent construction. This is for real-time grasping compaction frequency by measuring the position of compaction machinery by using total station (TS) or GPS (Global Positioning System) while implementing areawide quality control of embankment. Subsequently, some other procedures seem to be formulated next year such as:
1) 'Procedure Plan for Work Progress Management': transforming design information or work progress information necessary for work progress into 3-D data, obtaining 3-D coordinate information of work progress by using TS, and implementing construction management and document control by using a special program.
2) 'Procedure Plan for Pavement Works': Directly controlling a heavy equipment with 3-D design data, managing the operating positions of a compaction machine in sequence, and measuring the work progress with 3-D measurement data by TS.
Also for these plans, JCMMRI has been addressing trial works based on advance construction experiments or the procedure plans, in cooperation with each initiative MLIT Regional Development Bureau, MLIT National Institute for Land and Infrastructure Management (NILIM), Public Works Research Institute (PWRI), and so on.
As intelligent construction is widely introduced in various work sites, need to standardize the way to exchange data treated in different systems also rose. At present, efforts are made towards ISO standardization for the data format, and Mr. Ageishi takes part in the activity as a committee member. Particularly, Japan is playing a leading role in providing an information model and a data dictionary in 'ISO/TC/127/WG2 (machines for earth-moving operation and traveling machines for road construction works - work site data exchange).
Another theme that Mr. Shuji Ageishi takes charge of is a research on construction robot. Two projects proceeding simultaneously are the key to the efforts for this theme. One of them is 'Development of Construction Management Technology by using 3-D information' commissioned by NILIM, and the other one is 'Development of IT Construction Technology for Construction Machinery' commissioned by PWRI.
The former project assumes that information about construction management will be exchanged in the form of 3-D CAD data or product models in future. Scheduled to continue through this fiscal year, demonstration test has been carried out based on the standard model of earth works proposed by NILIM as a main member, along with examination on "what kind of model to give to the work site, and how to assess the result?" from the view points of measurement and management of 3-D information, and its utilization technology.
Among them, JCMMRI is focusing on organizing and demonstrating models and the information data which conforms to a fundamental part of modeling, as well as on examining new construction management standard that will be required subsequently.
On the other hand, in the latter project, a construction robot is considered as something that works in an environment where various kinds of information are available, and not as a mere machine for automation. Mr. Shuji Ageishi personally believes that it is necessary to follow this direction.
Therefore, targeted at measuring real-time construction situation as 3-D information, JCMMRI tried to develop a laser system and a system with regards to stereo treatment in order to provide the functions of the external sensor required for robots.
 |
|
 |
|
 |
 |
 |
|
 |
|
 |
|
 |
|
 |
|
'One thing that is now entering in the list of JCMMRI's study themes is how to grasp damage at an early stage from the information obtained by a small aircraft etc. in the occasions of natural disasters that occur frequently, ' says Mr. Ageishi.
By extending the approach of introducing IT into the area where judgment has been made by human visual inspection, from construction works to maintenance, there may be another availability of information.
In addition, unattended construction technology is likely to be applied to disaster rehabilitation. In planning countermeasures for such disasters, he observes that a new form of construction robot, as an evolutional form of the present approach, provides a clue with regards to the way to go in the near future.
We would like to extend our heartfelt appreciation and gratitude to the individuals who took time off their busy schedule for our interview.


