High performance Large Scale Driving Simulator based on
Interactive 3D VR Simulation & Modeling Software UC-win/Road
8DOF Traffic Safety Simulator
Program Overview
This large scale Driving Simulator was planned and built for the Research Institute of the Highway Ministry of Transport in China (RIOH) to be used in their traffic and safety research work. It was designed and built in accordance with their detailed specification, the whole project being managed throughout by FORUM8 engineers.
In January 2009, FORUM8 received the order for customized development of this Driving Simulator following an international tender and in February 2014, the Final Acceptance Test was complete, marking the completion of the entire project.
The following is an explanation of the features and an overview of the high performance large-scale Driving Simulator based on FORUM 8's Real-Time Interactive 3D Virtual Reality Simulation & Modeling Software UC-win/Road.

Functions and Features
Image of the whole system
-
The accompanying photograph shows the 8 degrees of freedom vehicle simulator which is based on a 6 degrees of freedom motion platform plus Yaw and X tables.
This system allows the user to be immersed in an extremely realistic environment, as similar to the real world as technically possible by utilizing a 360 degree view projection system within the dome. This was made possible via the UC-win/Road cluster system (UC-win/Road is a real-time interactive 3D VR simulation & modelling software) along with the use of appropriate sound equipment and vibration devices etc. The vehicle and truck cabin's, which can be quickly and easily exchanged if needed, are set within a dome structure, along with the advanced management system including CCD camera, image monitor and recording system etc.
The traffic simulator and vehicle motion models consist of the most advanced system for measuring driver behaviour data, including eye-tracking etc., and are directly linked to UC-win/Road, which all leads to further advances within driver safety research.
▲Image of the whole system
System Configuration
-
- Measuring and analyzing a driver's psychological characteristics and conducting research based on the results (lane change, acceleration/deceleration, turning, etc.)
- Researching the driving behavior of individuals divided into age groups (youth/adults/seniors, etc.)
- A function for researching the effects on traffic safety due to a variety of driver distractions (mobile phone, radio, etc.)
- The effect on traffic safety due to tiredness
- A function for researching the influence of alcohol, disease and drugs on traffic safety, and impaired driving behavior
- A function for road safety assessment at the design stage
- A function for road safety assessment at the management and maintenance stage
- Researching the technology for maintaining drivers' safety when they are traveling in special sections of the road (long downhill road, tunnels, sharp curves, intersections, etc.)
- A function that enables detailed research into driving safety under changing road conditions including lighting, induction, and visibility
- VR optimization design function for road landscape and traffic facility installation
- A function that enables detailed research on technology for maintaining road safety under conditions in which multiple drivers are operating within the same transport network
- A function for traffic safety research under bad weather conditions (fog, ice and snow, high and low temperature, snowstorm, wind, etc.).
- A function for traffic safety and emergency and security countermeasure research under extreme traffic conditions (traffic accidents, abnormal traffic incidents, etc.).
- A function that enables the validation of the latest in-vehicle ITS systems
- A function that reproduces traffic accidents and judicial test function.
■Expected outcome and functions
1.Function designed for driver behavior research
Having the ability to reproduce the driver's driving sensation accurately, the simulator enables the users to conduct driving behavior research to evaluate a whole host of 'human factors' which may affect road traffic system.
2. Road traffic safety research functions
This simulator possesses road traffic safety research functions useful for research based on the status and design of the individual 'road' within the road traffic system.
3. Traffic safety research under special environmental circumstances
This simulator enables the user to investigate the effects and subsequent driving actions under a range of different environmental conditions.
4. Other functions
As the FORUM8 Driving Simulator can faithfully reproduce the real driving sensation it has many other applications in driving behavior research.
SYSTEM
-
- Reproduces the feeling of driving on a rough road surface (Direct Setpoint).
- Reproduces the vibration when driving on different roads (Frequency Spectrum).
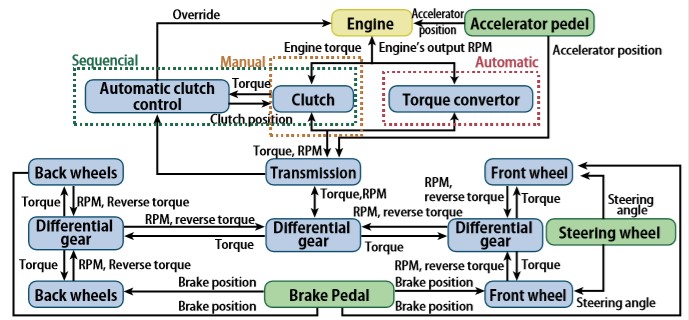
▲System Block Diagram
■DOME
The dome is composed of 8 sheets of flange type FRP panels. FRP is a hard and light material that covers the vehicle cabin whilst also functioning as a screen for the projection system.


▲Top of the dome (above photo), entrance of the dome (bottom photo)
■Multi Projector System (8 units)
Barco SIM5R Projector
The multi-projector system within this high-performance simulator is composed of 8 individual projectors. Using edge blending technology, the system provides a 360° simulation environment for the driven vehicle. The direction and angle of the projectors was determined after simulation verification by an expert consultant. The projector system is structured in a way that does not obstruct the driver's view.
▲Barco SIM5R Projector
■Real Car Cabin (Honda Accord)
The simulator incorporates the real cabin of a Honda Accord. The engine was removed to be replaced with equipment such as the electronic control system and acoustic PC. A PC power and a connection terminal for Internet connection has been placed inside the cabin. The original vehicle's steering wheel and accelerator / brake pedals are used to help achieve the real driving sensation.

■Truck Cabin
Made to Order Truck Cabin
The steering, accelerator & brake pedals, seat and seat belt are from a real Hyundai truck.


■Yaw-Table
Bosch Rexroth Yaw-Table for EMotion-4000
This is installed between the 6DOF motion platform and the vehicle cabin, and makes the vehicle itself rotate when it turns at an intersection or a sharp curve, reproducing realistic vehicle behavior.
■Vibration System
Bosch Rexroth EMotion-4000 Vibration
This unit connects part of the Yaw-Table and the wheel, and produces fine vibrations at high frequency to give the driver a different feel when driving on different road surfaces.
■6DOF Motion Platform
Bosch Rexroth EMotion-4000-6DOF-700-MK2
This unit reproduces the basic vehicle motion model and faithfully reproduces the vehicle’s posture when driven by calculating the vehicle dynamics. Possible movements include a combination of the 6 directions: Pitch, Roll, Yaw, Sway, Surge, and Heave.


■X-Table
Bosch Rexroth Order Made Long Excursion 1 Axis Motion Table
This is the long distance linear motion system that supports the 6DOF on the floor. It transmits the centrifugal force to the driver in the case of long distance acceleration.
■Cluster Computer System
Cluster Computer System is composed of 1 master PC for control and another 8 PCs for display. Each channel is rendered using its dedicated display PC, and 8 display PCs are synchronized using the master PC, allowing the projection of a video to the 360-degree dome-shaped screen.






■Eye tracking System
face LAB is a product developed by Seeing Machines Inc., a spin-off company of the Australian National University (ANU).
This system measures the motion of the face based on information from two video cameras that automatically track the person's face in real time. This software captures the facial features 3 dimensionally from an image, extracts the facial features and tracks these features.
When a facial feature changes on the screen, it will keep tracking even when the head rolls fast or when part of the image of the face on the screen is distorted, by choosing a new feature dynamically. The output data is; eye movement, position of the head, rotation, tightness of the eyelid, movement of eyebrows and lips and the size of the pupil (pupillometer).
A person's face naturally tells you a great deal about their mental state. By using this system we can measure a person's intentions and the degree of attention from examining the person's countenance.

■Traffic Simulator
Vissim is an industry standard micro-simulation traffic software product. It can simulate traffic flows by taking into account the way individual vehicles influence each other within a network. It is used in a variety of ways including helping in the identification of problems due to heavy traffic and congestion. Vissim can run complex traffic simulations including; bicycles, cars, buses, taxis, short and long distance trains, which makes it possible to predict delays in public transport due to congestion and verify the effect of introducing bicycle lanes.
■Vehicle Dynamics Simulator
CarSim and TruckSim are vehicle dynamics simulation software systems developed and commercialized by US company Mechanical Simulation Corporation Inc. These software tools are used by automotive engineers to evaluate the dynamic behavior of vehicles under a variety of driving and environmental conditions (cars, trucks, buses, motorcycles). CarSim and TruckSim are industry standard products, used by over 30 auto manufacturers, 60 parts manufacturers and 150 universities and research institutes around the world. The products have an enviable reputation within the fields of vehicle dynamics control engineering and R&D related to ITS. These software products are also used in rollover car accident analysis and road design.




Other Subsystems (Sound, Power source, DVR)
-
Sound system
In order to ensure the highest level of performance, the sound system has an independent Sound PC, supporting the sound of the driven vehicle, the sound of the surrounding environment and the communication voice between the cabin and the control room.

Power source system
A UPS (uninterruptible power supply) is connected between the power source and the computer system in order to protect the computer system and the experimental data from any unexpected power failure. The UPS can supply a stable power source for 10~20 minutes, so providing the operators time to shut down the system and return the motion platform into a settled position. In addition, the operator can separate the ACC#1 and ACC#2 into 2 steps, controlling the 6DOF motion platform and other motions (X-table/YAW-table, Vibration) separately.

DVR system (Digital Video Recorder)
Several CCD cameras are positioned within the cabin, DOME, and simulation room to continuously monitor the system in operation. There is a recording function, which along with the Data LOG function can be used to research drivers' behavior.
Modeling&Simulation UC-win/Road
-
- Model a horizontal curve of a road including line, circle and relaxation curve (horizontal alignment)
- Model slope and vertical alignments
- Cross-sectional models including the shoulders of the road, traffic lines, curbs, median strips, emergency stopping lanes, etc. (transversal alignment)
- Simulate the road surface textures including asphalt, concrete, sand, soil, etc.
- Special road models including; bridges, tunnels, crossings, interchanges, etc.
- Slope models including the soil textures, frame protections and stones
- Trees, flowers, grasses etc.
- Buildings, toll gates, gas stations, service areas etc.
- Landscapes distinct to specific regions including plains, mountains, cities, suburbs, etc.
- Geographical landscapes including sky, mountains, rivers etc.
- Traffic facilities including traffic signals, guardrails, sound insulation walls, information boards, lighting facilities.
- Traffic flow models including vehicles or non-vehicles, pedestrians etc. or other objects including animals etc.
- Simulate the sound of the engine, horn, tires on the different road textures, tunnel wind and the crash between the vehicles and obstacles.
- Simulate the sound of various kinds of traffic flow in a road traffic network.
- The sounds of the environment, such as in a rain or wind can be set.
3D Realtime Interactive Virtual Reality Software UC-win/Road
3D Realtime Interactive Virtual Reality Software UC-win/Road won the 2002 Software Product of the Year (Japanese Ministry of Economy, Trade and Industry). It is an advanced real-time interactive 3D VR simulation & modeling software product that enables the user to replicate the real world in 3D Space.
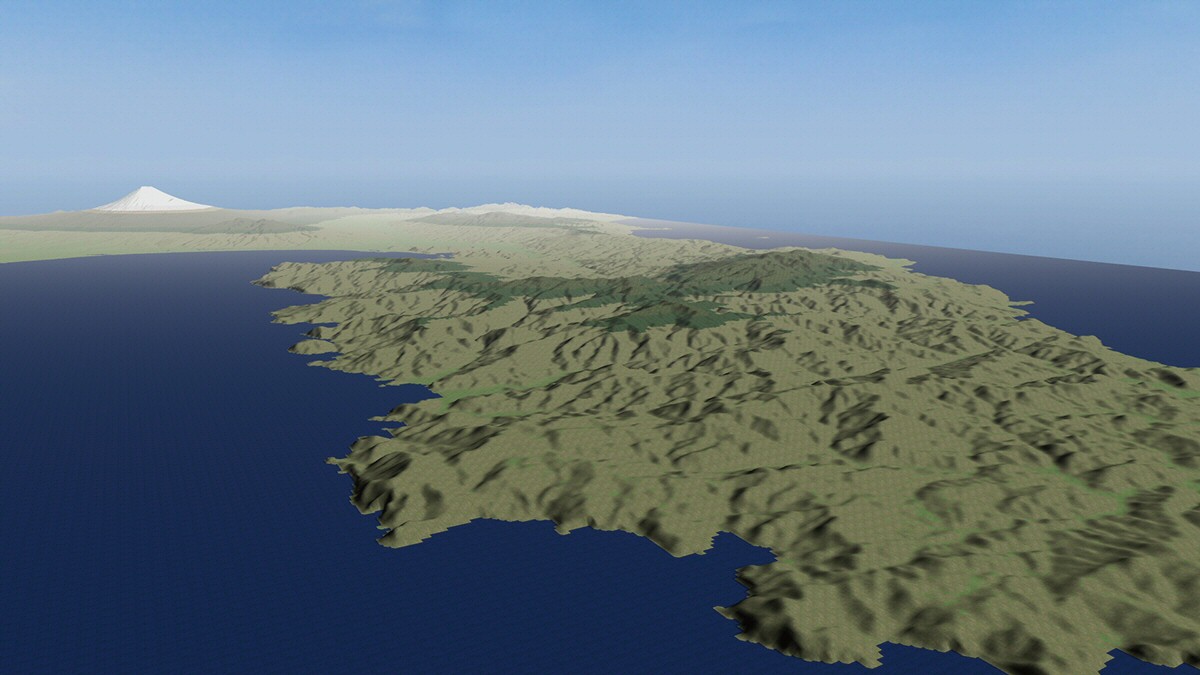
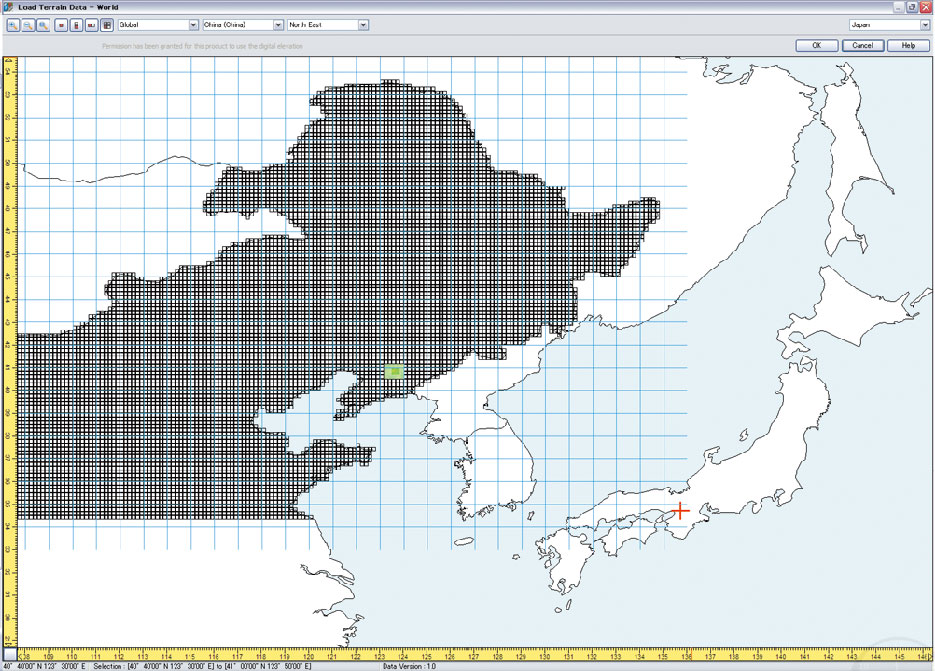
■Terrain modeling
Specification: The RIOH specification included the ability to import Chinese terrain
Solution: CGIAR-CSI SRTM 90m Database is supported in UC-win/Road. Functions to paste the satellite photographs, convert DXF-XML and edit 3D and 2D terrain are available.

■Road modeling
Specifications:
Solution:
All sorts of lines such those depicting roads, rivers, lakes or flight paths can be drawn at will either by hand or by inputting parameters. Roads, tunnels, bridges, rivers or pathways can all be automatically generated. Tunnel and bridge sections can be assigned by defining these within the horizontal road alignment and the vertical alignment of your choice. Cuttings and embankment cross sections can be defined very accurately and a wide variety of textures can also be assigned. The alignment / cross section generation feature helps you create roads with complicated geometry very easily.
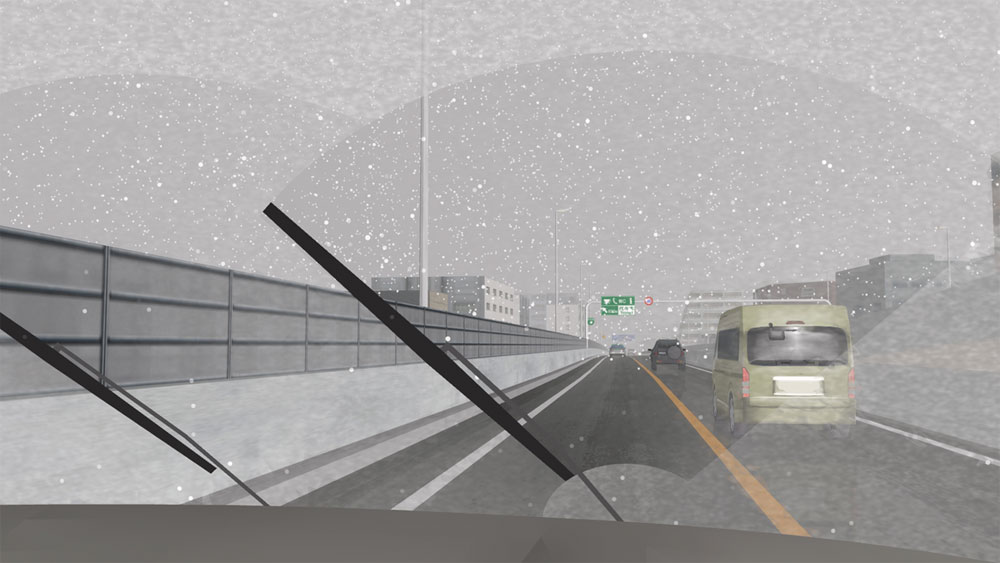
■Special Weather Effect
Specification:
The characteristics of different road surfaces along with all environmental conditions including rain, snow, ice, etc. to be simulated.
Solution:
Other than the ability to visualize any kind of weather condition, the texture and friction of any given road can be assigned to reproduce the frictional effect as well as the vibration effect upon the driven vehicle. The visualization of rain and snow is accurately simulated. Realistic rain / snow, splashing water and thunder bolts / lightning can all be visualized. Fog can have its area specified and visualized and windshield wipers including those hanging down from the top of the windshield can have their pivoting movement simulated.

▲Road surface

▲Water puddle

▲Rain ripple

▲Thunder

▲Windshield wiper (snow)
■Road DB
To include road signs, warning signs, information signs or other signs conforming to the standard of GB5768 (Can be made available using the SDK, or customized)
The road signs in China and the standards of signs 'GB5768' are supported, along with many other signs from other countries, all downloaded from our database.
■3D modeling
Specification:
Solution:
Efficient VR data creation assistance through the use of standard models / textures and an extensive DB. In addition to the standard data including 3D models and textures, over 5000 3D models are available directly from the UC-win/Road DB on the Internet. Also, useful editing and movement tools are available, allowing scaling up and down, movement, rotation, inclination and arrangement of the models. Action setting offers generation and motion control of moving models.

■Linkage function
Specification:
Regarding importing the road models or facilities' models, other standard modeling software (Creator, VEGA etc.) to be supported.
Solution:
UC-win/Road has been made compatible with the following model creation formats 3DS, FBX, MD3, COLLADA, OBJ.
■Data linkage
Specification:
Supports importing the external data including AutoCAD etc.
Solution:
Useful features include DXF-XML conversion as well as a 3D and 2D terrain editing feature. Supporting the open format LandXML allows you to share the information of terrain, road linear and cross section by linking with CAD such as Civil 3D or InRoads. The output function of LandXML of UC-win/Road has been certified.
■VISSIM
Specification:
An interface to link with traffic simulation software (VISSIM) is available
Solution:
The imported analysis results of traffic flow from VISSIM can be visualized. Using Micro Simulation Player users can read ANSI.TXT files of VISSIM into UC-win/Road. After reading the results of the simulation, set the position to display the simulation result and choose the models to show vehicles and pedestrians. Finally, you can operate the reproduction of the traffic simulation result like a movie file and can check the traffic situation in 3D space.
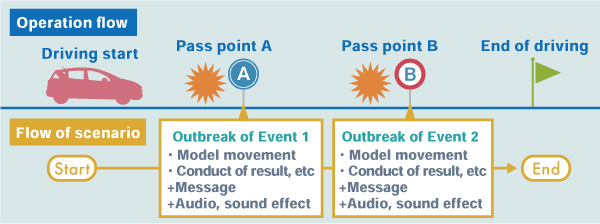
■Driving simulation / scenario function
Specification:
Simulate specified traffic accidents (crash, passing etc.) and representation of traffic congestion
Solution:
Various pre-fixed movements can be set to models. A scenario is a flow from the start to the end of the simulation and composed of the various events that have been set. Scenarios can be set to simulate any type of real emergency event in VR.
■Audio system
Specification:
Solution:
Using OpenGL, a variety of surrounding sounds, the car's sound (sound of engine tire, wind, tunnel reflection sound) are supported. Lowpass filter is supported. Squeal sound (slip sound) and sound reproduction of 4 different wheels is also supported.
■Control system
Specification:
Accurate dynamics models, including the characteristics of tires to be supported so that the change in direction at curves, accelerating and decelerating performance matches the actual test parameters.
Solution:
Because the movement of all 4 wheels of the vehicle can be modeled, UC-win/Road allows more realistic movement by implementing a model of the overall vehicle movements, engine and the transmission from engine to each wheel.
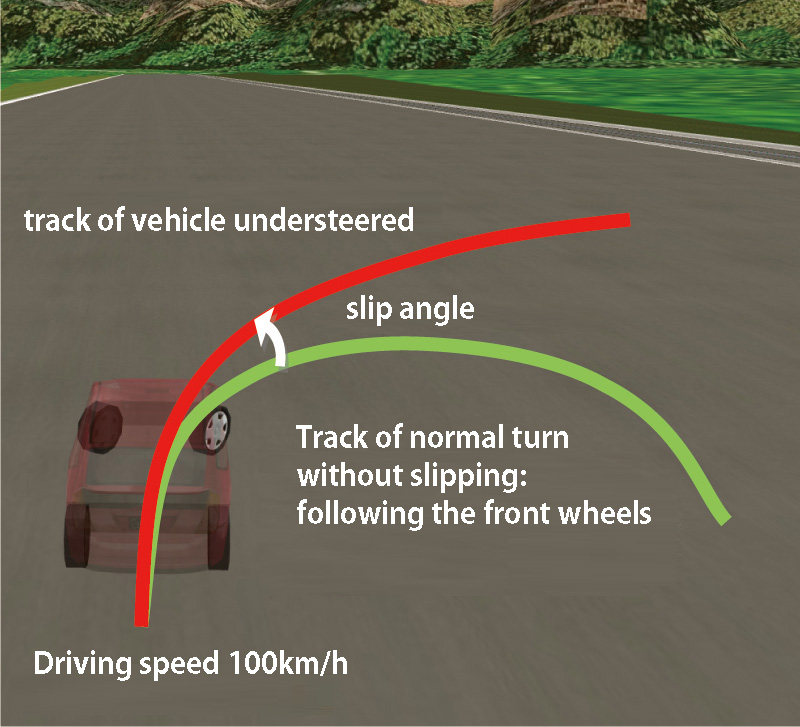
■Vehicle movement model
Specification:
Dynamic models are accurately simulated according to the road surfaces in various kinds of weather (rain, snow and ice) as well as the performance under braking.
Solution:
It is possible to simulate understeering and oversteering. Understeer is what occurs when a car steers less than the amount operated by the driver. Oversteer is what occurs when a car turns by more than the amount operated by the driver.



Driving simulation standard model UC-win/Road
-
In addition to the ability to create VR models for driving simulation, UC-win/Road is equipped with the following 4 standard model types. All of them are real time VR models that can make effective use of the features of the driving simulator modeled from real roads. It provides a flexible driving environment by means of the scenario function, environment switching function and the switching of cabin and motion model.

■Urban road VR data
As part of the project we reproduced the urban area road network of the Chinese capital city having the "No. 3 loop line" of Beijing city as the center. Modeling all lines' road signs, marked lines (Chinese GB5768-2009 criterion correspondence) and guide plates, and placed them in accordance with local video coverage. Dozens of wide roads with widths of more than 4 lanes on one side and "solid cross - bridges" which are intersections of radiation path and loop line have been created, faithfully reproducing the road infrastructure, railroads and buildings. In addition to the landmark buildings, such as the venue of the 2008 Olympic the "bird's nest", the 3D city model realistically reproduces Beijing's urban loop line network and the overall sense of urban space.




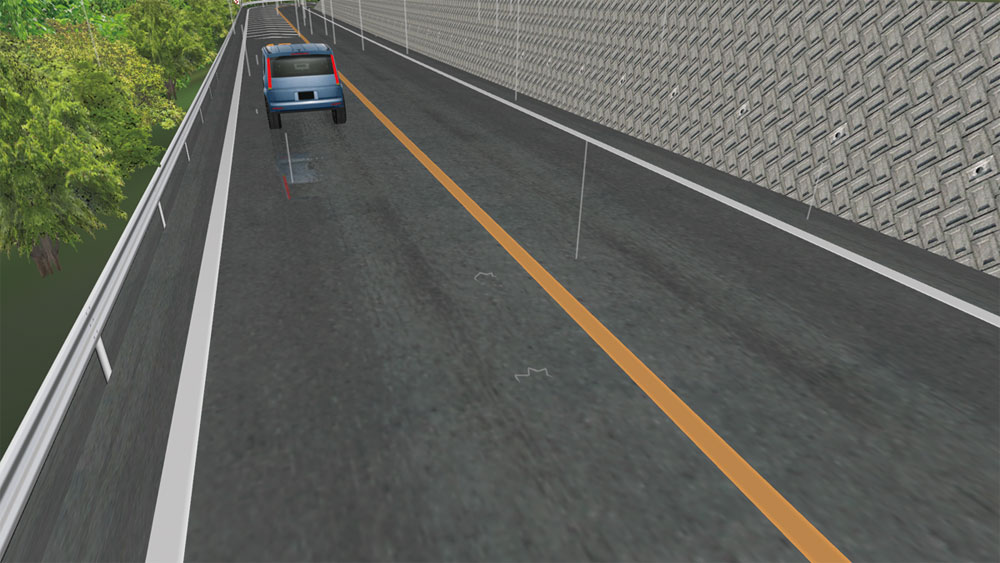
■Highway VR data
An actual VR model of national road G110 was created. The conventional common national road with two-way two-lane has been extended to 2 one-way two-lane roads, separated from each other but running in parallel. The data creation was based on the design diagram of the extended road under construction. This model realistically reproduced the scene common to road construction sites in which passing vehicles are mainly large trucks. There are also various special environmental conditions built in such as rain and snow. Even a frozen road surface can be experienced from the driver's perspective in the driving scenario. The VR data has been designed to provide the optimum driving environment, allowing faithful reproduction of the vehicle behavior and driving sensation.




■Mountain road VR data
This is a VR environment reproducing part of the national road G109. It has been designed to faithfully reproduce the road structure to provide a realistic feeling of acceleration and centrifugal force to the driver, especially when the vehicle passes a curve of a different radius. The continuous curve in the VR space was created based on a video recording of the real road. The whole 3D environment was created based on the on-the-ground research photos such as those depicting the gutter structure of the road cross section, drainage ditches and the texture of the cut earth.




■Infinite Loop Road Data
This VR environment was produced to research 'fatigue driving' in which the driver keeps driving indefinitely using the newly developed "traffic connection" function. A typical Chinese cross-section is applied for the road structure and for the traffic flow of vehicles, road information was obtained from actual on-the-ground research which faithfully reproduces the traffic flow.