
| ●UC-win/Road Customize System | UC-win/Road Customize System |
●Introduction
UC-win/Road ,which is consist of many tiny modules, .allows advanced customizing a low cost.
Changing of existing functions and addition of new functions are allowed by customizing of input/output changing and addition of modules.
Following are the introduction of basic procedure of customize and some examples.
| ●Module Changing/Adding Driving Simulation System In this customizing, it was required to change UC-win/Road driving vehicle motion model and user's hardware, and output log of driving situation. Before customizing, modular configuration is shown under the figure.Nomally, you input operation volume of pedal and steering wheel from a normal game controller and caluculate the motion. of vehicle And more,acceralation and orbit of vehicle are calculated on their separated modules. Changing of existing module "calculation of vehicle acceleration " allows customizing of vehicle engine motion model. Analog devises can be supported: adding "analog pedal devise input" and "pedal operation input switch” module, allow coexistence between a game controller and a hardware. Last adding of module "collection and saving of log data" allows collection and output about driving simulation data. a right figure shows last modular configuration. |
 |
|---|
●New module development
Basic technologies have been developed for customizing and new package is designed and developed to make full use of new features. Driving scenario functions to enhance driving simulation is under development, which will be equipped with UC-win/Road 3.4 as next version.. This scenario functions offer a event happening to draw drivers' attention and develop several stories.
Regarding the latest technologies of computer graphics, Shaders language is adopted to process terrain textures or express advanced light source for VR-Studio as next product.
 |
 |
|
| ▲Shaders language is adopted to realize the advanced light source expression. | ||
●UC-win/Road Demo Simulator
UC-win/Road Demo Simulator was developed for exhibition or information guidance, which is designed compact equipped with simplified steering wheel, accelerator/brake pedal and operation 2ch buttons and 17inch touch panel. The Demo simulator with PC in its frame is adopted as a simulator for PR on road stations to draw drivers' attention for safe driving. This system can be used for exhibition or PR of road facilities.
 |
 |
|
| ▲UC-win/Road Demo Simulator | ▲front view |
●UC-win/Road Drive Simulator Motion Platform
"Motion Platform" as option of, UC-win/Road Drive Simulator allows make driver feel a sense of togetherness.
Motion Platform is higher priced than our UC-win/Road Drive Simulator because degree of freedom, capable weight, reproduvible acceleration, reaction ability and reproducible range of movement are more capable. Degree of freedom includes 6axis pitch, roll, yaw, sway, surge and, heave. Now UC-win/Road Motion Platform Option is scheduled to be developed, which allow developing plug-in independent from degree of freedom.
| Simulator products group | * PC sold separately/hardware warranty is issued by the manufacturer | ||||||||||||
|
|||||||||||||



●Remote operation of operational machine a man - machine interface
This development was entrusted by Japan Construction Method and Machinery Research Institute, Japan Construction Mechanizational Association as a part of informational construction research under machanizational costurction.in 2007
Remote operation in danger area is dependent on the quality of interface.
To ensure the efficiency of accuracy and work, it need to tell the work condition of costruction machine in real time. UC-win/Road is adopted on interface of operator. Several functions are developed and installed,which are capable of checking work situation or display to give directions on 3DVR in real time. This has been checked by experiment on site.
| 1) | 3dimentional information(photo, screen) Terrain data is expressed as a 3D terrain data, receiving information from PC equipped with GPS on construction machine, terrain lazar scan, video camera device by wireless LAN. Action is expressed in real time, reflecting location information and operating condition of machine to construction machine. |
||
| 2) | Operational direction under the construction step Work (operation) procedure in this system are as right Operation - Check - Excavation direction - Confirm of finished form Switchable display of step such as plain, cross section, 3D is implemented to make operator easily understand by just watching the interface. |
||
| 3) | Display of cross-section During excavation, on cross-section connecting construction machine and excavation target, current terrain and design terrain line are expressed ,which allows checking their condition in real time. |
||
| 4) | Check of finished form Finished forms can be checked as a numeric value, displaying with gradetion. this was carried out by displaying the current terrain obtained mesurements by lazor scan over the design form specified before working as plain mesh. |
||
 |
 |
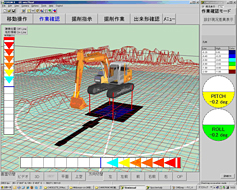 |
| ▲3 dimensional information(photo) | ▲3dimentional information(screen) |
"UC-win/Road Customize System" is recommend to develop advanced and flexible system

