 |
 |
|
This series of articles is about the theme of "system development. Each issue will introduce various topics based on Forum8's system development experience. This time, we will treat the vehicle perimeter detection function and camera sensor function.
Introduction of UC-win/Road Autonomous Driving / ADAS Package
-Vehicle perimeter detection function and camera sensor function-
■ Introduction
On December 2nd, 2022, Forum8 released "UC-win/Road Autonomous Driving / ADAS Package" (hereinafter referred to as 'this package')". This package contains several plug-ins and applications for the 3DVR software "VR Design Studio UC-win/Road" and can be utilized for research on autonomous driving and ADAS. The outline and configuration of this package is shown in Figure 1. In this issue, we will discuss the "Vehicle Perimeter Detection Plug-in" and "Camera Sensor Plug-in". For other functions, please refer to our website*1.
 |
| ▲Fig.1 Overview of Autonomous Driving / ADAS Package |
■ Vehicle Perimeter Detection Plug-in
-Function-
This plug-in detects objects such as other vehicles and road signs around the vehicle in operation and displays frame lines and specified information around the detected objects. In Figure 2, the frame lines and numbers surrounding vehicles and pedestrians are color-coded, which change color depending on various variables such as speed and distance from the vehicle in operation.
Although there is Object Detection Plug-in similar to this plug-in, only Vehicle Perimeter Detection Plug-in has the functions of the "specified value display" that specifies and displays values such as model speed and distance between vehicles, and the "color change by specified value" that changes the color of the frame line and numbers according to the specified value.
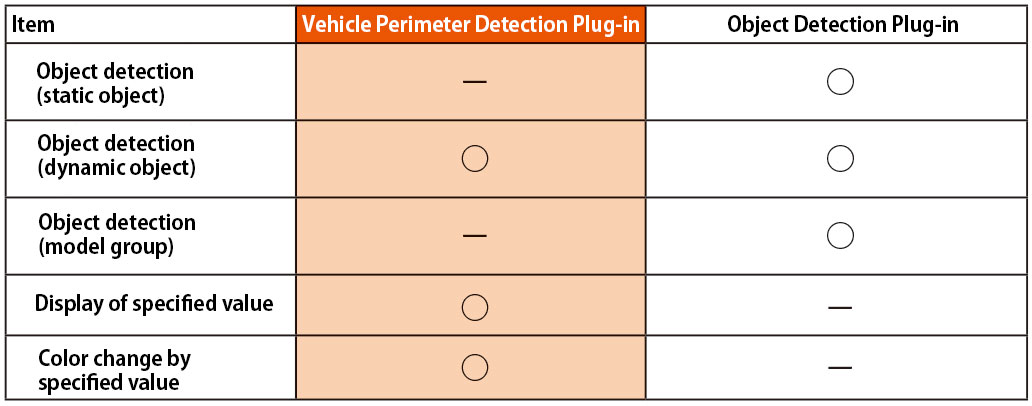 |
| ▲ Table 1 Comparison with Object Detection Plug-in |
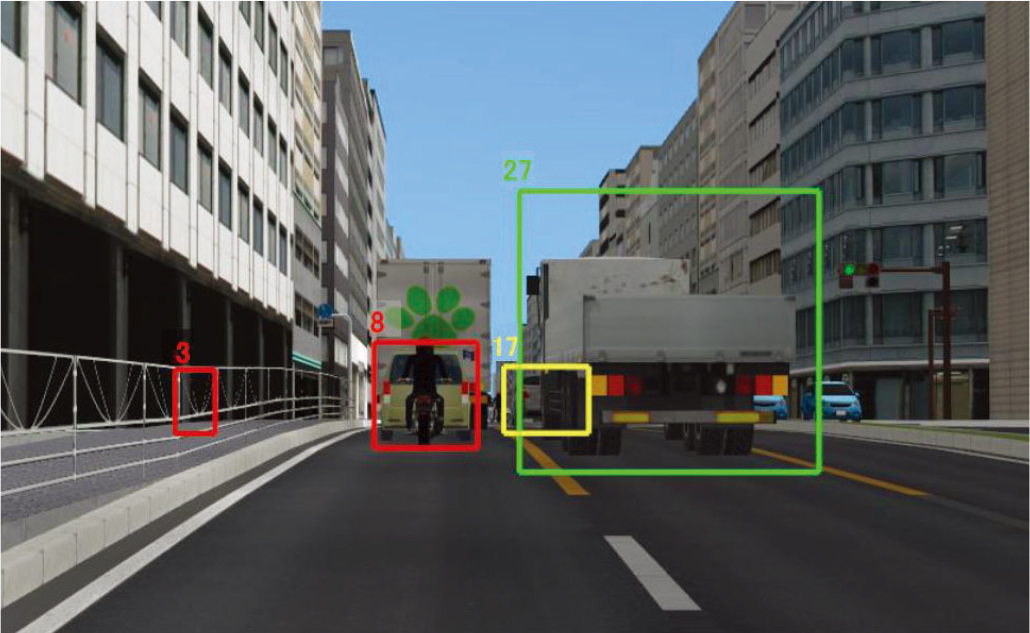 |
| ▲ Fig.2 Vehicle Perimeter Detection Plug-in (Numbers in the figure indicate speed (km/h)) |
-Future Development-
We plan to extend the system to various communication formats so that it can simulate V2X communication (V2V: Vehicle-to-Vehicle communication, V2P: Vehicle-to-Pedestrian communication, etc.) for autonomous driving. In consideration of those various communication formats, we will also enhance the function to detect objects such as other vehicles around the vehicle in operation and transmit object information to the outside world.
■ Camera Sensor Plug-in
-Function-
Using the standard features of UC-win/Road, you can place cameras anywhere in the VR space. As shown in Figure 3, multiple cameras can be installed. Figure 4 is the image of segmentation using a custom shader sample renderer*2, which can be used for AI image recognition learning. Figure 5 shows a distorted image generated by Camera Sensor Base Plug-in, which is similar to images taken by real camera the camera.
These images were previously utilized within UC-win/Road, but we have implemented a function to transmit images in a general-purpose communication format by using the Camera Sensor Plug-in (Fig.6). The images acquired from the cameras equipped with vehicles in operation in UC-win/Road can be transmitted to the linked system in real time via UDP communication. This makes it possible to use the camera images from UC-win/Road in external software simulations.
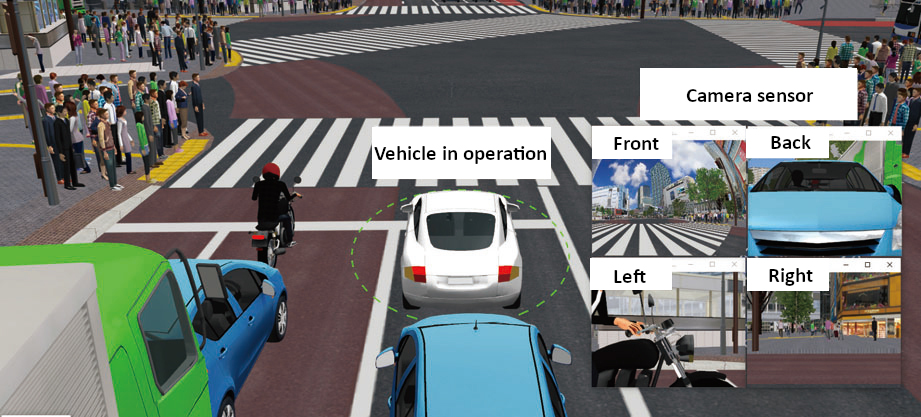 |
| ▲ Fig.3 Basic functions of UC-win/Road to generate images from multiple cameras |
 |
| ▲ Fig.4 Segmentation by object selection |
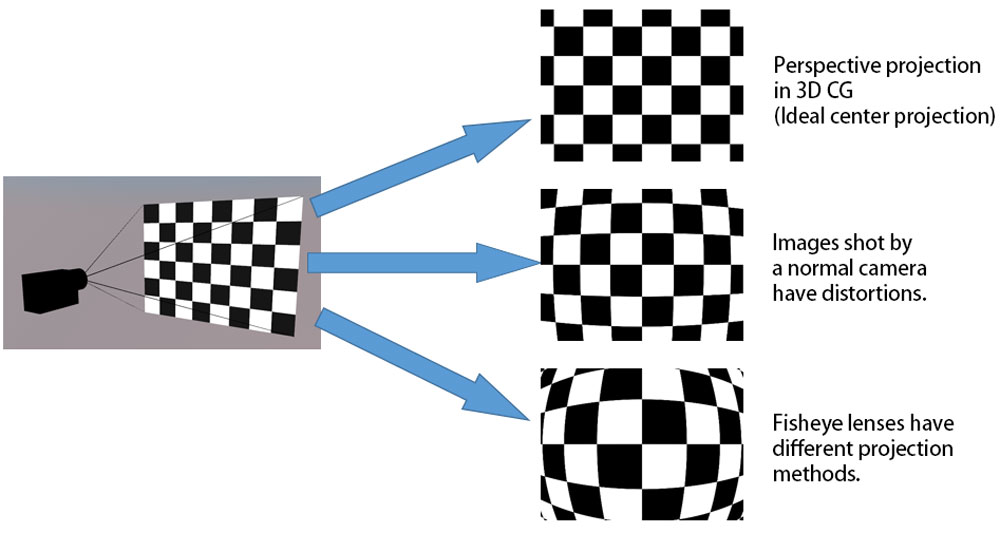 |
| ▲ Fig.5 Generate distorted images using Camera Sensor Base Plug-in |
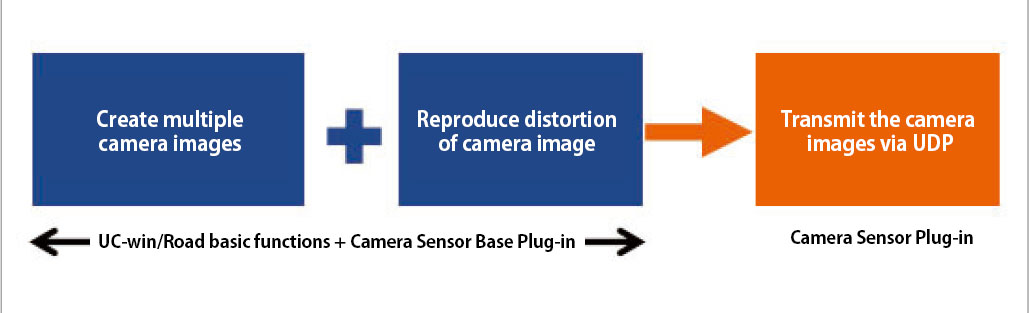 |
| ▲ Fig.6 Functions of this plug-in |
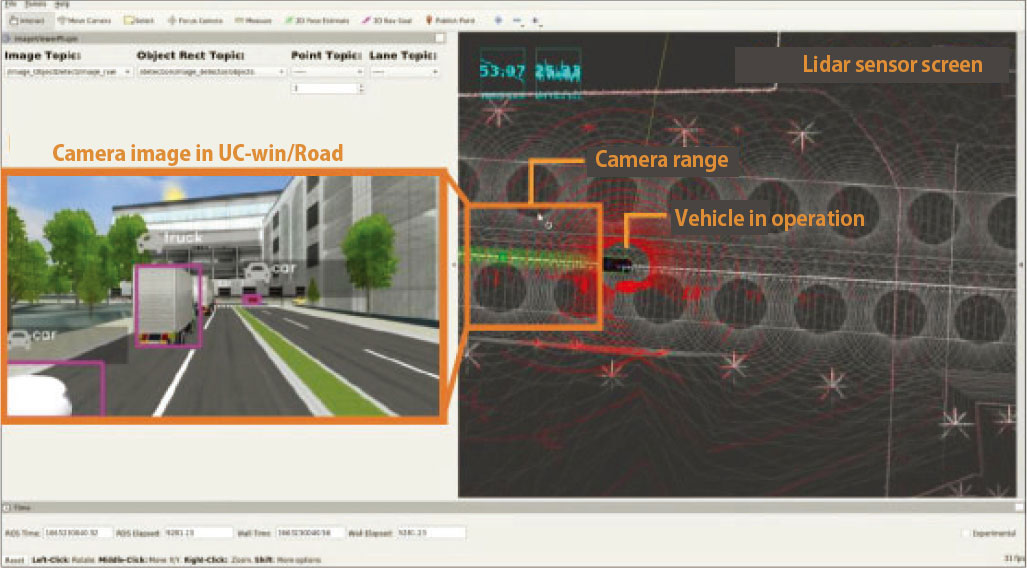 |
| ▲ Fig.7 Linkage with Autoware |
-Future Development-
In future versions of the software, we plan to improve it to better reproduce the characteristics of real cameras. Specifically, we will make it possible to reproduce physical phenomena of lenses such as blur, noise, and bokeh. In addition, the Lidar sensor will be supported to send depth information to external software.
■ Conclusion
In this topic, we introduced the Vehicle Perimeter Plug-in and Camera Sensor Plug-in from the functions of Autonomous Driving / ADAS Package. The Vehicle Perimeter Detection plug-in quantitatively displays speed and distance between vehicles, allowing comparative analysis of how the driver's operation changes depending on whether the information is displayed or not. The Camera Sensor plug-in can transmit images of driving to external devices, so it can be applied to tasks such as checking driving conditions from a remote location with images, in addition to the video recognition by Autoware presented in the simulation case study.
This package consists of plug-ins and applications, and it can be used immediately with UC-win/Road, without the need for environment configuration. Another advantage is that vehicle and pedestrian models can be registered and installed entirely via GUI, without the need to create separate data files.
We will continue to develop functions useful for research and development of autonomous driving and ADAS. Please look forward to it.
●Note
*1 Product Information "UC-win/Road Autonomous Driving / ADAS Package" https://www.forum8.co.jp/english/uc-win/adas-e.htm
*2 The custom shader sample renderer has been supported from UC-win/Road Ver.14. https://www.forum8.co.jp/forum8/press/press191105-e.htm
(Up&Coming '23 New Year issue)
|
|
 Up&Coming |
