UC-win/Road是可通过简单的顺序和操作制作VR(虚拟现实)的实时仿真软件。本程序中包含用于演示为目的的脚本功能。本功能随着版本升级也在不断扩展和改善,最新版UC-win/Road
Ver.8中,新增加了动画功能(代码化、分组功能)和现有功能的优化。这次就这些最新功能、应用方法,以及以往功能的应用方法进行介绍。
 |
 |
| ■图1 脚本的实行例 |
|
脚本是将命令实行的时机(模拟作为0秒开始时的时间)、按照时间系列设置详细参数、通过对其连续实行进行各种表现的功能。与进行互动体验时的场景功能不同,脚本功能一般是用于展示、自动演示的功能。
定义可能的命令中,包括操作照相机(视点)的命令、画面显示相关的命令、气象控制等多彩的功能,将这些命令组合制作。表1中显示了主要功能。
| 动作 |
功能 |
| 照相机 |
照相机(视点)位置、朝向的变更、视界(FOV、视野半径)相关设置。 |
| 画面表示 |
交通生成、3D模型、道路的显示/隐藏设置、画面的显示大小的设置等。 |
| 环境 |
气象(雨/雪)的设置、时刻的变更、太阳、亮度的设置 |
| 多媒体 |
信息的显示、声音视频的播放 |
| 对象 |
实行驱动可动模型部件的命令 |
| 行驶/飞行 |
道路及飞行路径上的视点移动 |
| 模拟 |
控制xpswmm,EXODUS,微观模拟播放器 |
■表1 脚本的主要功能 |
脚本,如果编辑长而复杂的脚本,必然实行的命令数也随之增多。UC-win/Road Ver.8.1.0中,由于可容易地进行命令的管理、作成数据的确认,将整理好的单位命令作为一个脚本代码化,并追加了将其组合使用的脚本动画功能(分组功能)。
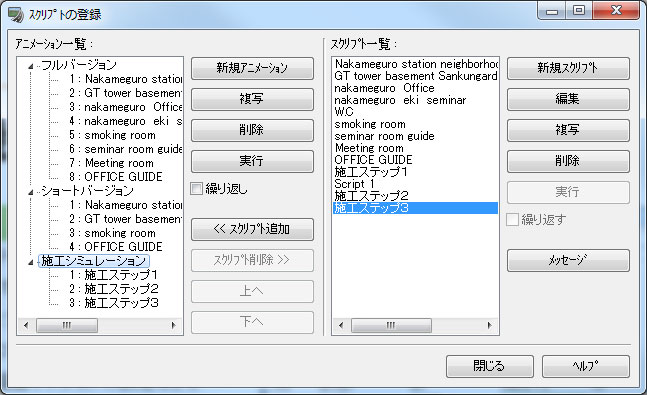
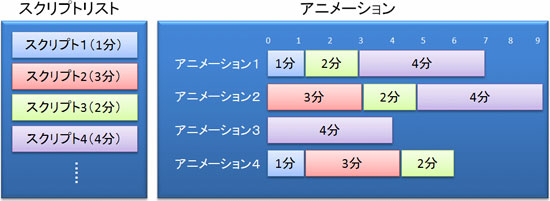
本功能考虑方法如图2所示。首先,将代码化的脚本添加到脚本列表。可添加多项。然后,制作包含复数条脚本组合的动画,每个动画分别使用哪个脚本,以及按照怎样的顺序进行播放,如图3所示在脚本登记画面进行定义。通过运用此功能,可得到以下利点。
- 根据演示目的,例如制作段时间版本和长时间版本,有取舍地选择组合脚本,制作不同时间的多个版本,并可更换顺序。
- 以往,为了确认脚本最后添加的命令,需要从最开始实行一边全部的命令,通过将其分割成复数个部分,可从途中(各部分的开始位置)开始进行确认。
- 通过动画功能,将整体脚本分割成复数个部分,各部分的动作完成后进行组合,达到作业效率化的目的。
- 只要准备好视野角、天气的初始化、显示画面的大小等常规设置,可留用于任意脚本,提高了作业效率。
 |
 |
| ■图2 动画功能的概念 |
■图3 动画的设置画面 |
|
脚本除上述以外可实行若干功能扩展。以下显示了主要扩展功能。
- 可从菜单「选项」-「脚本实行」的辅助菜单实行脚本
- 脚本实行中通过ESC键可停止脚本的实行
- 脚本实行中是否重复实行可通过「重复」图标设置
|
UC-win/Road是一款适用于表现施工模拟的工具。例如,可应用于临时规划、桩基打设、混凝土打设等施工顺序的确认、新工法讨论的VR表现等。施工模拟是按照不同的施工步骤显示构造物,或者表现起重机等场地机械模型的运作。
让构造物在某个时机出现,运用的是景观显示功能。将3D模型分配到景观的显示项目(例如,施工步骤1、施工步骤2,等),通过脚本对该景观显示项目变更,可在任意时机对构造物进行显示或者消去。
此外,为了流畅地显示构造物、表现起重机手臂等的动作,使用的是3D模型的动作命令。动作命令是指,在脚本中设置可控制的3D模型的部件等的动作,并由此实现以下表现。
- 3D模型的部件或整体,按照指定的速度移动到指定的位置(绝对坐标、相对坐标)。
- 3D模型的部件或整体,按照指定的角度旋转。
- 动作暂停、恢复、完全停止的控制。
构造物类似推出的表现,通常需要事先将3D模型放在看不见的位置,然后在任意时机使其移动。图4是对配置在地下的基坑壁的全体部件设置「向上方移动8m」的动作命令,在施工步骤推进过程中,展示出流畅地向上方移动的动画效果的例子。
 |
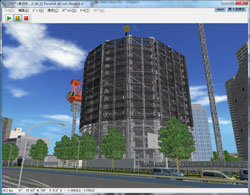 |
| ■图4 施工模拟例 |
|
使用脚本的飞行模式,在事先定义好的飞行路径上可流畅地视点移动。作为重要的演示功能,通过运用飞行路径的动作控制点命令,不单可以移动视点,还能进行各种控制。主要功能如表2所示。这些功能虽然在脚本的命令中也可实现,但在脚本中是对指定时刻的控制,而在动作控制点可对任意位置进行控制,变得更加容易定义。
| 命令 |
功能 |
| * CHANGE SPEED * |
变更移动速度。 |
| * TURN HEAD * |
在左右方向变更照相机的朝向。 |
| * TILT HEAD * |
上下方向变更照相机的朝向。 |
| * SLOWLY ??? * |
缓慢变更照相机的朝向。 |
| * LOOK AT ME * |
注视特定模型。 |
■表2 脚本的主要功能
本表的「* LOOK AT ME *」是注视指定模型的功能,场景中一边在上空回旋,一边照相机保持对特定模型的注视。图5是一边注视中央大厦,一边围绕其周围回旋的设置例。
 |
| ■图5 照相机控制的应用例(LOOK AT ME功能) |
|
脚本中具有控制外部模拟结果的功能。例如,进行河流泛滥、浸水、海啸模拟的软件xpswmm的解析结果的可视化、避难分析模拟软件EXODUS的可视化、其他应用程序解析的交通模拟、群集模拟的结果利用微观模拟播放器插件等通过脚本可进行控制。具体来说,可进行导入数据的模拟开始开始、停止、播放速度、播放阶段的变更、描绘设置控制等,可应用于各种类型的演示。图6是导入xpswmm的海啸模拟结果和EXODUS的避难模拟结果,展示了配合时机进行显示的例子,这种组合使用也是演示手法之一。
 |
 |
| ■图6 xpswmm和EXODUS的模拟控制例 |
|
| (Up&Coming '13 春季号刊载) |
 |
|


>> 惢昳憤崌僇僞儘僌
>> 僾儗儈傾儉夛堳僒乕價僗
>> 僼傽僀僫儞僔儍儖僒億乕僩
|