
|
|
|
UC-win/Road for RoboCar(R) ي”Œëں¬ê·¸ى¸مƒ»ىکµى…ک
 |
+ |
RoboCar(R)
 |
â—ڈي”Œëں¬ê·¸ى¸ ê°œىڑ”
- ى¹´ ë،œë³´ي‹±ىٹ¤ ي”Œë«يڈ¼مƒ»ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ى¹´ RoboCar(R)ى™€ ى—°ê³„ي•œ 리ى–¼يƒ€ى„ VR-UC-win/Roadى—گ ىکي•œ ى‹œë®¬ë ˆى´ى…ک ى‹œىٹ¤ي…œى„ ى†Œê°œي•©ë‹ˆë‹¤.
ë“œë¼ى´ë¹™ ى‹œë®¬ë ˆى´ى…ک 기ëٹ¥ى´ ى¶©ى‹¤ي•œ 버ى¶”ى–¼ 리ى–¼ë¦¬ي‹° ى†Œي”„يٹ¸ UC-win/Road를 ë،œë´‡ 기ىˆ ى„ يƒ‘ى¬ي•œ ى¹´ ë،œë³´ي‹±ىٹ¤ ي”Œë«يڈ¼ [RoboCar(R)]ى—گ
ى—°ê³„ى‹œى¼œ VR공간ى—گى„œىک ë“œë¼ى´ë¹™ى—گ ىکي•´ ى‹¤ى°¨ىک 1/10ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ى¹´ë¥¼ ëھ¨يک• ëڈ„ë،œىƒپ 등ى—گى„œ ى œى–´ى‹œي‚¤ëٹ” VRى‹œë®¬ë ˆى´ى…کى´ ê°€ëٹ¥ي•œ ى‹œىٹ¤ي…œى…니다.
â—ڈRoboCar(R)ë€
- RoboCar(R)ëٹ” ى£¼ى‹يڑŒى‚¬ ZMPى‚¬ê°€ 개발ي•œ ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ى¹´ë،œ ى´ي•کىک يٹ¹ى§•ى„ ê°€ى§€ê³ ىˆىٹµë‹ˆë‹¤.
- ى‹¤ى°¨ىک 10분ىک 1ىک ىٹ¤ى¼€ى¼ ëھ¨ëچ¸.
- 본격ى پى¸ 구ëڈ™ê³„, ى„œىٹ¤يژœى…ک, ى،°يƒ€ê³„.
- ىٹ¤ي…Œë ˆىک¤ ى¹´ë©”ë¼ى™€ ê³ ى†چ ي™”ىƒپ ى¸ى‹ ëھ¨ë“ˆ.
- ىٹ¤ي…Œë ˆىک¤ë·°ى—گ ىکي•œ ى¥ى• 물 ê²€ى§€, ى°¨ى„ ى¸ى‹ ى•Œê³ 리ى¦کى„ يƒ‘ى¬.
- ىگى´ë،œ ى„¼ى„œ, ê°€ى†چëڈ„ ى„¼ى„œ, ى°¨ë¥œ ë،œي„°ë¦¬ ى¸ى½”ëچ” 등ىک 내계 ى„¼ى„œ.
- ى پى™¸ى„ ى¸،거리 ى„¼ى„œ, ë ˆى´ى € ë ˆى¸ى§€ يŒŒى¸ëچ”(별매 ىکµى…ک)ىک ى™¸ê³„ ى„¼ى„œ.
- ëھ¨ي„° ى „ë¥ک, ى „ى§€ ى”ëں‰ 등ىک ëھ¨ë‹ˆي„°ë§پ.
- ë²”ىڑ© OSى¸ Linux를 يƒ‘ى¬. ë²”ىڑ© 개발 ي™کê²½ى—گى„œ ى• ي”Œë¦¬ى¼€ى´ى…کى„ ى‘ى„± ê°€ëٹ¥.
- 무ى„ ي†µى‹ ى—گ ىکي•´ PCى™€ ى—°ê³„.
â—ڈUC-win/Roadى™€ RoboCar(R)ىک ى—°ê³„
- UC-win/Roadى—گى„œëٹ” ى •ë°€ي•œ 공간 ي‘œيک„, 다ى–‘ي•œ êµگي†µ ي™کê²½مƒ»ى‹œë‚ک리ىک¤ë¥¼ ى„¤ى •ي• ىˆک ىˆىœ¼ë©°, ê°€ىƒپ공간ى„ ى£¼ي–‰ي• ىˆک ىˆىٹµë‹ˆë‹¤.
ي•œيژ¸ RoboCar(R)ى—گى„œëٹ” ى‹¤ى°¨ىک 10분ىک 1ىک ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ى´ë¼ëٹ” يٹ¹ى§•ى„ ê°€ى ¸, يک„ى‹¤ 공간ى„ ى£¼ي–‰ي• ىˆک ىˆىٹµë‹ˆë‹¤. ى´ëں¬ي•œ يٹ¹ى§•ى„
ى،°ي•©ي•¨ىœ¼ë،œىچ¨ ê°€ىƒپ공간ى—گى„œëٹ” ê²€ى¦ي• ىˆک ى—†ëٹ” ë³µي•© يک„ى‹¤ىƒپى—گى„œىک ى‹œë®¬ë ˆى´ى…کى´ ê°€ëٹ¥ي•ک게 ëگ©ë‹ˆë‹¤.
 |
|
 |
 |
|
â–²ëھ¨يک•ى—گى„œ ى£¼ي–‰ ي™کê²½ى„ ى‘ى„±ي•کê³ (ىœ„그림),
VR공간내ى—گى„œ ى‹œë®¬ë ˆى´ى…ک ى£¼ي–‰(ى•„ëک그림) |
|
|
â—ڈë،œê·¸ ى·¨ë“ ىکˆ
 |
|
 |
| â–²ë،œê·¸ ي™”ىƒپ |
|
â–²ى´ëڈ™ 궤ى پىک ى‚°ى¶œ |
- UC-win/Roadëٹ”, 대규ëھ¨ 버ى¶”ى–¼ 리ى–¼ë¦¬ي‹°(VRï¼ڑê°€ىƒپيک„ى‹¤)공간ى„ ى•Œê¸° ى‰¬ىڑ´ ىˆœى„œى™€ ى،°ى‘ىœ¼ë،œ 단ى‹œê°„ى—گ ى‘ى„±ي• ىˆک ىˆىٹµë‹ˆë‹¤.
ê·¸ى—گ 따른 다ى–‘ي•œ 리ى–¼يƒ€ى„ ى‹œë®¬ë ˆى´ى…کى„ ى œê³µي•´ ى™”ىٹµë‹ˆë‹¤.
ى´ë²ˆى—گ RoboCar(R)ى™€ ى—°ê³„ي•¨ىœ¼ë،œىچ¨ VRى—گ만 머물ى§€ ى•ٹê³ , 믹ىٹ¤ë“œ 리ى–¼ë¦¬ي‹°(MRï¼ڑë³µي•©يک„ى‹¤)ى—گى„œىک ى‹œë®¬ë ˆى´ي„°ى—گëڈ„ ى‘ىڑ©ى„ 기대ي•
ىˆک ىˆىٹµë‹ˆë‹¤. UC-win/Roadى™€ ى—°ê³„ي•¨ىœ¼ë،œىچ¨ 다ى–‘ي•œ ى‹œë®¬ë ˆى´ي„°ى—گ ى´ىڑ©ي•کى‹¤ ىˆک ىˆى„ê±°ë¼ ىƒê°پëگ©ë‹ˆë‹¤.
| RoboCar(R) RoboCar(R) & SDK 2010 |
â—ڈىٹ¤ى¼€ى¼ ëھ¨ëچ¸ى¹´أ—ë،œë´‡ 기ىˆ
- ىگëڈ™ى°¨ 기ىˆ (Automotive Technology)ê³¼ ë،œë´‡ 기ىˆ (Robot Technology)ىک ى§„ي™”ى—گ ىکي•´ ى§€ëٹ¥ي™”ëگœ ى°¨ى„¸ëŒ€
ىگëڈ™ى°¨ëٹ” ىگىœ¨ ى´ëڈ™ ë،œë´‡ê³¼ 다ى–‘ي•œ 기ىˆ ى„ ê³µىœ ي•©ë‹ˆë‹¤. ى´ ىƒˆë،œىڑ´ ى¹´مƒ»ë،œë³´ي‹±ىٹ¤ 분ى•¼ى—گى„œىک ى—°êµ¬, êµگىœ،ى„ ى‹¤يک„ي•ک기 ىœ„ي•´ى„œ 1/10
ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ ي”Œë«يڈ¼ى„ ى œê³µي•©ë‹ˆë‹¤.
ë،œë´‡ 기ىˆ ى„ ى پىڑ©ي•کى—¬ ىگىœ¨ ى´ëڈ™, ىگëڈ™ى°¨ê°„ ي†µى‹ , ىگëڈ™ى°¨ى™€ ى¸ê°„ىک ى¸ي„°ë™ى…ک 등ىک ى´ˆê¸° ى—°êµ¬ى—گ ي™œىڑ©ي• ىˆک ىˆىٹµë‹ˆë‹¤. ëکگي•œ 대ي•™,
기ى—… 등ىک ى œى–´ ى´ë، ي•™ىٹµ, ىگëڈ™ ى œى–´ ى‹¤ىٹµ, 개발 ي”„ë،œى„¸ىٹ¤ êµگىœ،ى—گ ي™œىڑ©ي•کê³ ى‚°ى—…계ى™€ êµگىœ، يک„ى¥ى„ ى—°ê²°ي•کëٹ” ى—”ى§€ë‹ˆى–´ ىœ،ى„± êµگى¬ë،œىچ¨ëڈ„
ى œê³µي•©ë‹ˆë‹¤.
â—ڈى¶©ى‹¤ي•œ ي™کê²½ ى¸ى‹ ي”Œë«يڈ¼
- ىٹ¤ي…Œë ˆىک¤ ي™”ىƒپ ى²ک리 ëھ¨ë“ˆ
ىٹ¤ي…Œë ˆىک¤ ى¹´ë©”ë¼ى™€ ي™”ىƒپ ى²ک리 보드를 ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ى¹´ 본ى²´ى—گ يƒ‘ى¬ي•´ 리ى–¼يƒ€ى„ىœ¼ë،œ ي™”ىƒپ ى²ک리를 ى‹¤ي–‰ي•©ë‹ˆë‹¤. ىگىœ¨ ى´ëڈ™ ى‹œىٹ¤ي…œىک ى•Œê³ 리ى¦کى„
ى—°êµ¬ى‹¤ë‚´ى—گى„œ ê²€ى¦ ê°€ëٹ¥ي•©ë‹ˆë‹¤.
- ى پى™¸ى„ ى¸،ê±° ى„¼ى„œ
ى¥ى• 물 ê²€ى§€ë‚ک ى£¼ى°¨ ى„œيڈ¬يٹ¸ 등ى—گ ى´ىڑ©ي• ىˆک ىˆëٹ” ى پى™¸ى„ ى¸،ê±° ى„¼ى„œë¥¼ يƒ‘ى¬ي•©ë‹ˆë‹¤. ى„¼ى„œëٹ” ى°¨ى²´ىک ى „ي›„, ى¸،ë©´ىک ى„¤ى¹ک바를 ى´ىڑ©ي•´ ىœ ى €
ىٹ¤ىٹ¤ë،œ ىگىœ ë،게 ى„¤ى • ê°€ëٹ¥ي•©ë‹ˆë‹¤.
- ىگى´ë،œ ى„¼ى„œ, ê°€ى†چëڈ„ ى„¼ى„œ, ى°¨ë¥œ ë،œي„°ë¦¬ ى¸ى½”ë“œ 등ىک 내계 ى„¼ى„œ
ى°¨ëں‰ىک ىڑ´ëڈ™ ي•´ى„ 등ى—گ ى´ىڑ©ي• ىˆک ىˆëٹ”, ê°پى¢… ى„¼ى„œë¥¼ يƒ‘ى¬ي•کê³ ىˆىٹµë‹ˆë‹¤.
- ى†Œيک• ë ˆى´ى € ë ˆى¸ى§€ يŒŒى¸ëچ”
ىکµى…کىœ¼ë،œ ى†Œيک• ë ˆى´ى € ë ˆى¸ى§€ يŒŒى¸ëچ”를 ى„¤ى¹ک ê°€ëٹ¥ي•©ë‹ˆë‹¤. 본격ى پى¸ ىگىœ¨ ى œى–´ ى‹œىٹ¤ي…œىک ى—°êµ¬ ىڑ©ëڈ„ى—گ ىµœى پى…니다.
ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ ى „기ىگëڈ™ى°¨
ى „기ىگëڈ™ى°¨ ى‹œىٹ¤ي…œ, MATLABR/Simulinkï½®ى™€ىک ى—°ê³„, 무ى„ ي†µى‹ ى„ ى´ىڑ©ي•œ 리ëھ¨ى½ک ى»¨يٹ¸ë،¤
- ىœ ى € ى• ي”Œë¦¬ى¼€ى´ى…کىک يƒ‘ى¬
ىٹ¤ى¼€ى¼ ëھ¨ëچ¸ى¹´ 본ى²´ى—گ OS를 يƒ‘ى¬, PCىƒپىک ىœ ى € ى• ي”Œë¦¬ى¼€ى´ى…کê³¼ ى—°ê³„, 무ى„ ي†µى‹ ى„ ي™œىڑ©ي•´ 다ى–‘ي•œ ى¥ى¹کى™€ ى—°ê³„
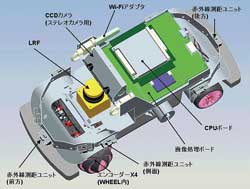 |
| ▲본ى²´ ë ˆى´ى•„ى›ƒ ى´ë¯¸ى§€ |
â—ڈى´ىڑ©ى”¬, ىڑ©ëڈ„ ى‚¬ë،€
- ىœ„ي—ک يڑŒي”¼ ى–´ى‹œىٹ¤يٹ¸ 기ىˆ ىک ى—°êµ¬, ىگëڈ™ ى£¼ى°¨ىک ى—°êµ¬, ىگىœ¨ ى£¼ي–‰ ى•Œê³ 리ى¦کىک ى—°êµ¬, 그룹 ى œى–´, ى¸ي”„ë¼ يک‘ى،°ىک ى—°êµ¬ 등
â– RoboCar(R)ىک ى‚¬ى–‘ ى¼ëŒ
| ىƒپي’ˆëھ… / يک•ë²ˆ |
RoboCar(R) / ZMP RC-Z |
| ى‚¬ى´ى¦ˆ / ى¤‘ëں‰ |
429.0 x 195.0 x 212.2,ى•½3kgم€€(ىµœëŒ€1kg까ى§€ ى¶”ê°€ ى پى¬ ê°€ëٹ¥) |
| ى‹œىٹ¤ي…œ 기본 구ى„± |
ىٹ¤ي…Œë ˆىک¤ ى¹´ë©”ë¼ |
VGA CCD 30fpsم€€(x2) |
| ي™”ىƒپ ى¸ى‹ ëھ¨ë“ˆ |
ZMPى‚¬ ى œي’ˆ ëھ¨ë“ˆ((IMAPCAR(R) : NECى‚¬ ى œي’ˆ ë³‘ë ¬ ي”„ë،œى„¸ى„œ) |
| ë©”ى¸ ى»¨يٹ¸ë،¤ëں¬ |
CPU : AMD Geode(R) LX800 Processor 500MHz |
| ي†µى‹ ëھ¨ë“ˆ |
Wi-Fiي†µى‹ ëھ¨ë“ˆ IEEE802.11 b/g/n |
| 내계 ى„¼ى„œ |
ىگى´ë،œ 1ى¶• |
| ê°€ى†چëڈ„ 3ى¶• |
| ë،œي„°ë¦¬ ى¸ى½”ëچ”(ى°¨ë¥œ x4, 구ëڈ™ ëھ¨ي„°ى¶• x1) |
| ى™¸ê³„ ى„¼ى„œ |
ى پى™¸ى„ ى¸،ê±° ى„¼ى„œ (x8) |
| ë ˆى´ى € ë ˆى¸ى§€ يŒŒى¸ëچ” *ىکµى…ک |
| ىƒ¤ى‹œ, ي”„ë ˆى„ |
ى¹´ë³¸FRPىƒ¤ى‹œ, ëچ”블 ىœ„ى‹œë³¸ ى„œىٹ¤يژœى…ک, ZMPى‚¬ ى œي’ˆ ى•Œë£¨ë¯¸ëٹ„ ي”„ë ˆى„ |
| ëھ¨ي„° ë“œë¼ى´ë²„ |
ZMPى‚¬ ى œي’ˆ ëھ¨ë“ˆ |
| ى„œë³´ ëھ¨ي„° |
ë،œë´‡ىڑ© ى„œë³´ ëھ¨ي„° |
| 구ëڈ™ىڑ© ëھ¨ي„° |
ى†Œيک•DCëھ¨ي„° |
| ë°°ي„°ë¦¬ |
ى œى–´ ى‹œىٹ¤ي…œىڑ© ë°°ي„°ë¦¬ 단3 니ى¼ˆىˆکى†Œى „ى§€ (x12)
구ëڈ™ىڑ© ë°°ي„°ë¦¬ 니ى¼ˆىˆکى†Œë°°ي„°ë¦¬يŒ© (x1) 7.2V |
| ë©”ى¸ ى»¨يٹ¸ë،¤ëں¬ OS |
Linux (ى†Œي”„يٹ¸ 리ى–¼يƒ€ى„) |
| ى»¨يٹ¸ë،¤ ى†Œي”„يٹ¸ى›¨ى–´ |
ى œى–´ ى†Œي”„يٹ¸ى›¨ى–´, ZMPë¼ى´ë¸Œëں¬ë¦¬, 네يٹ¸ى›Œيپ¬ى†Œي”„يٹ¸ى›¨ى–´ |
| ي™”ىƒپ ى²ک리 ي”„ë،œى„¸ى„œ |
ى „ىڑ© ى½”ë“œ |
| OS |
Windows(R) / Linux |
| 개발 ي™کê²½ |
gcc |
※[RoboCar(R)][ë،œë³´ى¹´]ëٹ” ى£¼ى‹يڑŒى‚¬ ZMPىک 등ë،ىƒپي‘œى…니다.
â—ڈي–¥ي›„ىک 개발 ىکˆى •
- ى œ2يƒ„ىœ¼ë،œىچ¨ [UC-win/Road]ى™€ ZMPى‚¬ ى œي’ˆ 9ى¶• ëھ¨ى…ک ى„¼ى„œ[e-nuvo IMU-Z]를 ى—°ê³„ى‹œى¼œ ë“œë¼ى´ë²„ىک ىڑ´ى „ ىگى„¸ë‚ک
ëڈ™ي–¥ىک ê²€ى¶œى´ ê°€ëٹ¥ي•œ VRى‹œë®¬ë ˆى´ى…ک ى‹œىٹ¤ي…œىک 개발ى„ ىکˆى •ي•کê³ ىˆىٹµë‹ˆë‹¤.
يڈ¬ëں¼ى—گى´يٹ¸ى™€ ZMP, ى°¨ى„¸ëŒ€ ىگëڈ™ى°¨ى™€ ى„œë¹„ىٹ¤ ë،œë´‡ 분ى•¼ى—گى„œ ى œيœ´ë،œ
م€€م€€يڈ¬ëں¼ى—گى´يٹ¸ىک ë“œë¼ى´ë¹™ ى‹œë®¬ë ˆى´ي„°ى™€ ZMPىک ى¹´ ë،œë³´ي‹±ىٹ¤مƒ»ي”Œë«يڈ¼ RoboCar(R)ê°€ ى—°ê³„ |
- ى£¼ى‹يڑŒى‚¬ يڈ¬ëں¼ى—گى´يٹ¸ى™€ ى£¼ى‹يڑŒى‚¬ ZMPëٹ”, ىگëڈ™ى°¨ë‚ک ى°¨ى„¸ëŒ€ ëھ¨ë¹Œë¦¬ي‹°, ىگىœ¨ ى´ëڈ™ ë،œë´‡ىک 개발ى„ ê°€ى†چى‹œي‚¤ê¸° ىœ„ي•´, ى œيœ´ي•ک게 ëگکى—ˆىٹµë‹ˆë‹¤.
ى œ1يƒ„ىœ¼ë،œىچ¨ يڈ¬ëں¼ى—گى´يٹ¸ى‚¬ ى œي’ˆ 버ى¶”ى–¼ 리ى–¼ë¦¬ي‹°(VR)ى†Œي”„يٹ¸[UC-win/Road]ى™€ ZMPى‚¬ ى œي’ˆ ى¹´ ë،œë³´ي‹±ىٹ¤مƒ»ي”Œë«يڈ¼[RoboCar(R)]ى„
ى—°ê³„ى‹œي‚¨ VRى‹œë®¬ë ˆى´ى…ک ى‹œىٹ¤ي…œ[UC-win/Road for RoboCar(R)]ى„ 개발ي–ˆىٹµë‹ˆë‹¤. ê·¸ى—گ ë”°ë¼ ىگëڈ™ى°¨ ë؟گ만 ى•„니ë¼
ىک¤ي”¼ىٹ¤ىک 경비ë‚ک ى²ى†Œ, ê³µى¥ىک ë°کى†،ىڑ© 등ىک ىگىœ¨ ى´ëڈ™ ë،œë´‡ىک ى‹¤ى œ ي™کê²½ى—گى„œىک ى‹œë®¬ë ˆى´ى…کى´ ê°€ىƒپê³¼ يک„ى‹¤ ى–‘ىھ½ى—گى„œ ى‹¤ى‹œي• ىˆک ىˆê²Œ
ëگ©ë‹ˆë‹¤.
|
UC-win/Road DSى²´ي—ک ى„¸ë¯¸ë‚ک
م€€â—ڈى¼ى‹œ ï¼ڑ 2010ë…„ 7ى›” 9ى¼(금)م€€13:30~17:00م€€م€€م€€â—ڈى°¸ê°€ë¹„ ï¼ڑ 무료
م€€â—ڈيڑŒى¥ ï¼ڑ يڈ¬ëں¼ى—گى´يٹ¸ ëڈ™ê²½ë³¸ى‚¬ GTيƒ€ى›Œ ى„¸ë¯¸ë‚ک룸م€€TVيڑŒىک ى‹œىٹ¤ي…œىœ¼ë،œ ëڈ„ى؟„مƒ»ىک¤ى‚¬ى¹´مƒ»ë‚کê³ ى•¼مƒ»ي›„ى؟ ىک¤ى¹´ى—گى„œ ëڈ™ى‹œ ê°œىµœ |
|
â– UC-win/Road for RoboCar(R)م€€ë¦´ë¦¬ىٹ¤ى¼ï¼ڑ2010ë…„8ى›” |
| (Up&Coming '10 ي•œى—¬ë¦„يک¸ 게ى¬) |
 |
|


>> گ»•i‘چچ‡ƒJƒ^ƒچƒO
>> ƒvƒŒƒ~ƒAƒ€‰ïˆُƒTپ[ƒrƒX
>> ƒtƒ@ƒCƒiƒ“ƒVƒƒƒ‹ƒTƒ|پ[ƒg
|


