自治体 官公庁ソリューション

 自動運転
自動運転秋田県港湾部のデジタルツイン、
自動運転安全検証と遠隔モニタリング
USER :
国土交通省 東北地方整備局

VRとメタバースによって自動運転が一歩前進
メタバースを活用した自動運転プロジェクトを実施
秋田県の港湾部において、国土交通省東北地方整備局の、港湾におけるトラック自動運転技術活用の安全性検証業務および、自動運転技術の検証業務を実施。デジタルツインを活用し、VRシミュレーションによる事前の安全性検証および、メタバースと実車GPS位置情報のリアルタイム連携による遠隔モニタリングを行っています。
この業務は、秋田港をモデルとして、トラックの自動運転技術を活用した実空間での安全性検証とともに、強風雪等の環境・条件下への影響について、将来の社会実装を考慮しながら検討を行うものです。
VR上のシミュレーションで自動運転システムの検討も実施
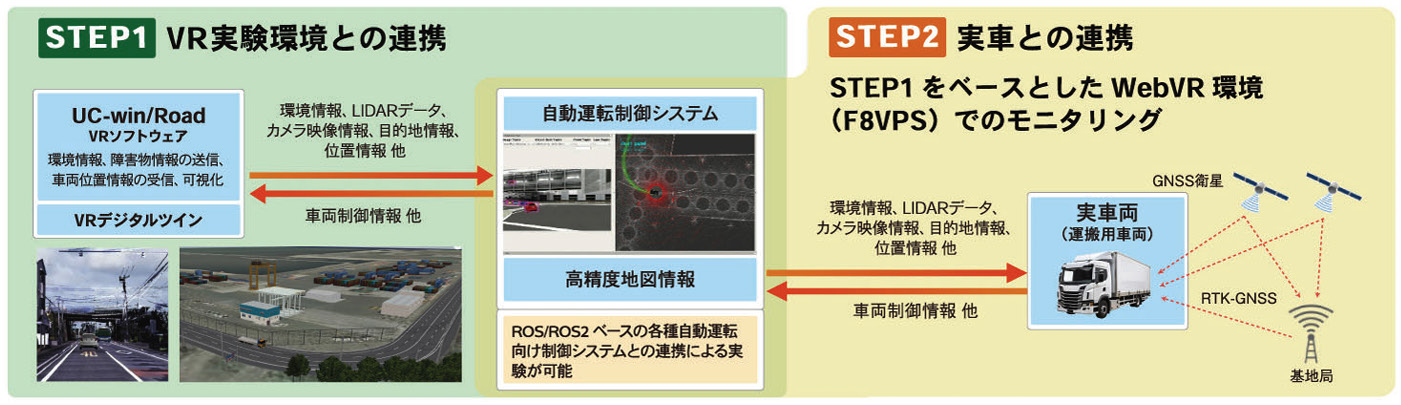
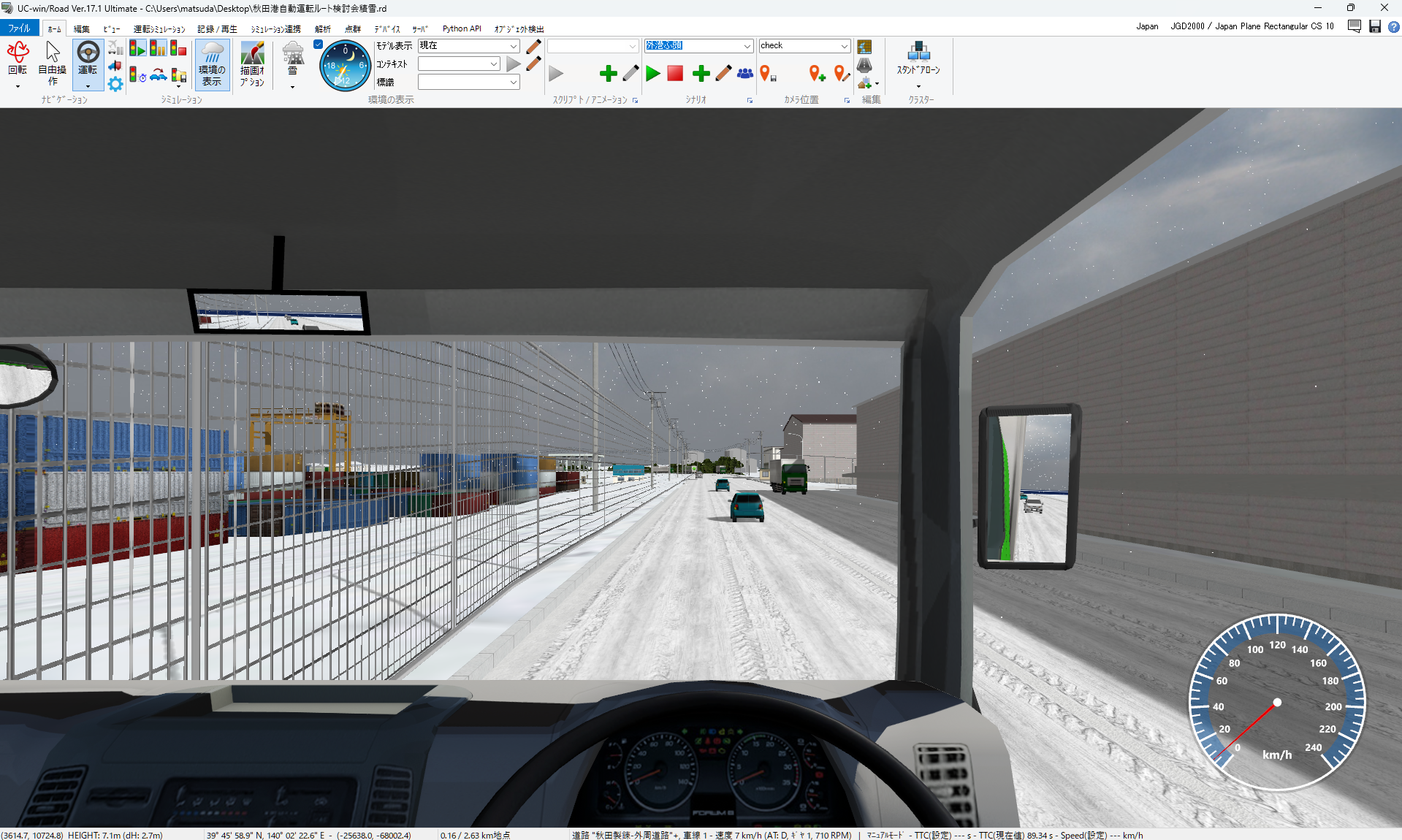
令和3年12月~令和4年6月には、実験用の対象エリアVRデータおよび、自動運転用の高精度3次元地図を作成。UC-win/Roadで実際の運転環境を再現した3DVR空間とROSシステムの位置情報を連携し、模擬3次元LIDARデータ、カメラ情報等をVR空間で取得して、自動運転向け制御システムに送信することで、事前の安全性検証シミュレーションによる自動運転システムの検討を実施しました。
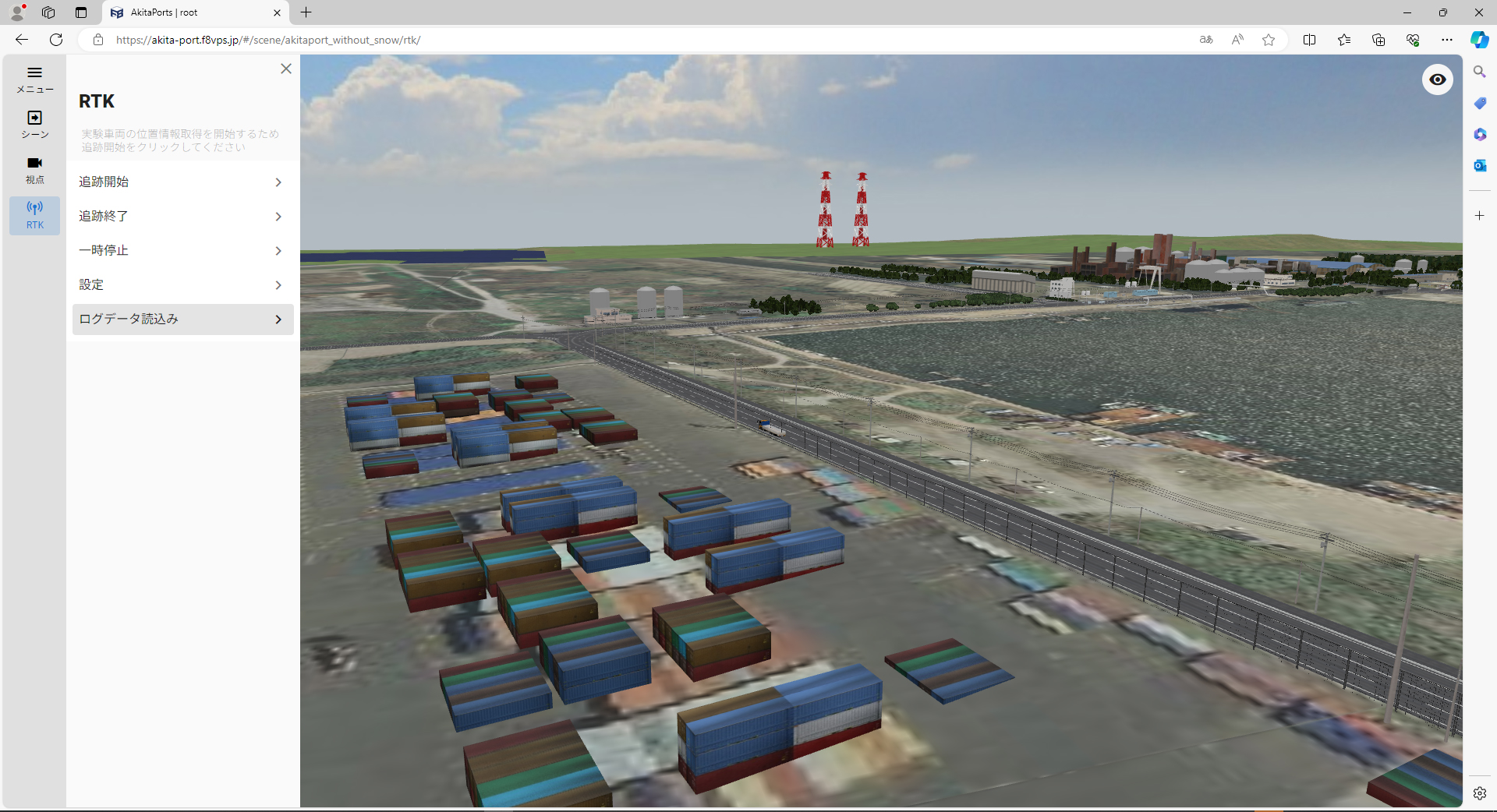
加えて、令和4年10月~令和6年3月には、実車両による実証実験、WebVR環境における実車GPS位置情報とメタバニアF8VPSにより、3DVR空間として構築。遠隔モニタリング・走行データの記録が可能です。
(記事内容は2024年当時のものです)